

|
|

|
Промышленный лизинг
Методички
Для звена OA: К = ~(СуК~ СЩ = - [OCi cos 30" - OCi cos (30° + ф)] = = - [cos 30° - (cos ЗО cos ф, - sm 30° sm Ф1)] = = - ( 2) • [cos 30° (1 - cos Ф1) +sin 30° sin Ф1]. Учитывая малость ф, получаем: I - С08ф1 = 2 51п2(ф1/2) яф;/2 и 51Пф1«аф1. Тогда К = - 4 [(КЗ/2). ф + ф J = 4 (0,866ф + Ф1). Для звена АВ: /22 = (1/2) 1и\ так как /ij = 2/zi, то /2, = /ii = -( 4) (0,866ф; + Ф1). Для звена FD: Лз = - (ВС, - Вс; cos Фз) = - ВСз (1 - cos Фз) = - ВСз ф:,/2. Так как - однородный стержень, то БСз = (1/2) (/cos 30° + /?) = 1/2 /(0,866+ 0,3) = 0,583/. Используя значение угла ф, найденное выше, получаем /гз = -0,583/ (3,85ф1)=/2 = -4,32/ф7. Подставляя выражения для вертикальных перемещений центров тяжести в формулу (7), получаем значения потенциальной энергии элементов в поле сил тяжести Яо, = -0,25О1/(0,866ф1 + ф1); (8) Яо, = -0,25С2/(0,866ф; + Ф1), (9) Ясз = -4,320з/фЬ (10) Потенциальная энергия системы равна сумме выражений (4), (5), (6), (8), (9) и (10). После приведения подобных членов по степеням обобН1,енной координаты ф1 имеем. Я = (1/2) ф,7 [13,18ci + l,32c2 +Сз)/-0,433 (Gi + G2)-8,65G3]-I-+ Ф1/ [-0,25(Gi + G2) + c,/„j]. Из условия равновесия (1) следует, что (аЯ/аф1)<р, = о = - 0,25 (Gi + G2) + Ci/„3 = 0. поэтому я = (1/2) / [13,18с1+1,32с2 + Сз)/-0,433 (С1 + 02)-8,65С,]ф?. (11) После двукратного дифференцирования выражения потенциальной энергии (10) но обобщенной коо)5дииате Ф1 получаем: аЯ/Эф? = / [(13,18q + 1,32с2 + с,) / - 0,433 (G + G) - 8,65G3]. в соответствии с неравенством (2) условие устойчивости рассматриваемого состояния покоя механической системы, изображенной на рис. 229, примет вид: /(13,18с, + 1,32с2+с,)- - 0,433 (Gi + G,)-- 8,65Сз > О,  fi0.5L Рис. 2,35 что равносилыю: /(C3+I,32q+I3,18ci)> > 0,433 (G1 + G2 + 2OG3). При выполнении этого неравенства заданное положение покоя является устойчивым. Б. Определение условий устойчивости состояния покоя механической системы с двумя степенями свободы. Определить условия устойчивости заданного состояния покоя консервативной механической системы с двумя степенями свободы. Принять, что варианты механических систем в состоянии покоя получаются из схем, изображенных на рис. 226-228, следующи.м образом: а) в вариантах 1 -15 стержень А В заменяется невесомой пружиной с коэффициен-то.м жесткости с, при этом в вариантах 4, 9, 14 диск с центром В получает возможность вращаться, скользя без трения но опоре; б) в вариантах 16-30 считать, что в точке D находится шарнир и спиральная пружина с коэффициентом крутильной жесткости с. Во всех вариантах пружины с коэффициентами жесткости с, q н с в положении покоя не деформированы. Пример выполнения задания. Определить условия устойчивости для механической системы с двумя степенями свободы, изображенной в положении покоя на рис. 235. Эта схема получена из механической системы, рассмотренной в предыдущем примере. Дано: веса элементов С, G, G3; коэффициенты жесткости упругих элементов 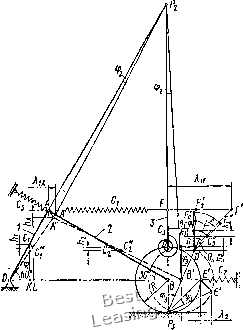 Рнс. 236 Cj, Co, С) и с; длина стержня OA - lvi радиус диска R --- 0,31. Известно, что спиральная пружина и пружины с коэффнииснгами жесткости Cj и с. в положе1п[и покоя tie деформированы. Решение. Выберем в качестве обобщеРН1ых координат углы (р и 6я, на которые стержни / и 3 отклоняются из положитя покоя. Оба угла отсчитываем в одном нанравленин (см. рис. 236). Исследуемая спсте.ма является консервативной, поэтому при (pj=0 и 63 = 0 должны выполняться равенства: (аЯ/Л(1),г,-0 = 0; (г}я/с)оз)ф,. о-0. (1) f,,,0 G, О По теореме Лагранжа -Дирихле состояние покоя рассматриваемой системы яачяется устойчивым, если наряду с равенствами (1) выполняются два ЭСТОНИЯ Сильвестра: 1. f,i>0 или tv>0; 2. =СцС.,,-с;>0. (2) где Гц, С.22 и fj., - коэффициенты жесткости системы, вычисляемые 1-., = ((?/7/(?фОг, - о; f „ - id41/d(i:;),f, - 0; 6,-0 0,-0 Су2--с.2г-{д-П/(к,дв,),-о. (3) Oj о При этом обобш,еннь[е координаты (d и о3 считаются малылш. Соотношения (3) при вычислении потенциальной энергии позволяют ограничиться слагаемыми второго порядка .малости относительно обоб-[ценных координат. Так как потенциальная энергия системы определяется суммой работ сил тяжести и сил упругости при иеремеи1еиин системы из (яклоненного положения в нулевое (положение гюкоя), то деформации пружин, не нагруженных в положении покоя, вычисляются с точностью до величин первого порядка малости, а вертикальные смещения центров тяжести тел и деформации пружин, нагруженных в положении покоя, -с точностью до величин второго порядка ма-лост1[ включительно. Для достижения указанной точности в выражениях углов поворота элементов рассматриваемой системы достаточно ограничиться величинами первого порядка малости относительно ц\ и 6,. При повороте стержня / (ОЛ) на угол Ф1, а стержня 3 (DF) на угол 63, все точки системы занимают новое положение. Иа рис. 236 точки, обозначенные буквами с верхним индексом в виде од1юго штриха, соответствуют положеиия.м, показанным с точностью до величин первого 1юрядка малости относительно ф) и б,, а точки, обозначенные буквами с верхним индексо.м в виде дв)х штрихов, соответствуют положениям, в которых учтены перемеще1п1я второго порядка малости. Опишем перемещения элементов снсте.чы, ограничиваясь величинами первого порядка .малости. Перемеи1ення звеньев OA, АВ и диска с центром в точке В полностью определяются обобщенной 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 [ 112 ] 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 |