

|
|

|
Промышленный лизинг
Методички
Поскольку (см. рис. 240) V (3/4) •/ у (1/4)-Г т, е. V = 3«/, то „ cifcr + iyT cfl, „,,92 Пи =-2----2- = ЗД,г/+• Потенциальная энергия системы Л = Л1 + Пи=-0,у-(iGJl) у + 3cf,,y + (9/2) • су\ Так как в положении покоя, соответствующем статической деформации пружины {дП/ду)у.о = 0, -Gi + Зс/ет-О. (а) Уравнение (а) можно получить также, составив уравнение моментов сил Мсо для положения покоя системы (рис. 242) 2 Мю. = Ро (3/4) • / - Gr., = О c/„.(3/4)./-Gi = 0, т. е. 3c,-Gi = 0. Таким образом, потенциальная энергия рассматриваемой механической системы П = 1-су--у=[9с-Щу Найдем значения членов уравнения (1): Уравнение (1) приобретает вид {n, + "i + у т, + бтр + (9с --)у = 0 Обозначив fe коэффициент при у, имеем: У + кУО. (2) Циклическая частота свободных колебаний jL-i/" 9c-8Gc/< . 1 /"9-20Q0-(8.3-9,81)/0,6 -, , 1 F mi+m2/2+(16/3)-m6-b6mi У 1+2/2 +(16/3) • 3-1-6• 1 Период свободных колебании T~2n/k-2 3,14/27,1 -0,23 с. Интегрируя уравнение (2), получаем уравнение движения груза / y--CjC()s/e/-l-Csin/. Для определения иостояупилх С, и С. найтсм урлвнение скорости груза: у = - Й6\ sin /г/ -- Cocos kt и воспользуемся начальными условиями задачи. Из уравнений y = y(t) и у---у(() при Г-О имеем Ln = C„ y„--kC,. Следовательно, Ci -Уп, С, --- ,. •. Подставляем эти значения С, и С, в урависпие у ~у (t) у -у:,с.ь; kt + (i/Jk) -sinki, -0,2 cos 27,l/-!-0,3sin 27,1/. Уравнение yy{t) можно ио.ччить в другом виде, если перейти к другим постоянным [ттегрировании а и р, приняв С, = asinp, = а cos р. Тогда = Qsin (Й + Р), а = V С] + С-2 и р arctg(Ci,/C2) а -У У( + {Уо/к)-; Р- arctg{ky,Jijo). Найдем числовые значения а и Р: а --= У 0,22 (8,0/27,1)2 = 0,36 см; Р = arctg (27,1 .0,2/8) = arctg 0,6775. Так как sinp>0 (Ci>0), то Р = 3407= 0,595 рад. Окончательно I/--. 0,36 sin (27,1/+ 0,595) см. 3 а д а [I и с Д-24. Исследование вынужденных колебаний механической системы с одной степенью свободы В механической системе тел 1-2 с одной степенью свободы возникают вынужденные колебания под действием силового во,,лущении. Схемы механических систем в положении покоя noi<;a;ianb! на рис. 243 - 245. Необходимые сведения о параметрах системы и силового возмуитеиия приведены в табл. 63. Диссипативные свойства системы заданы логарифмическим декре.\1Ситом колебаний системы.  X = Asinpt 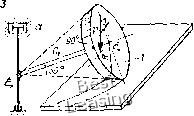  1р = ш1 4 ., I г el  X=AsL!ipl  C2 xAswiot 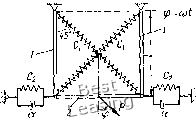 -1 p P AB  77777Г, 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 [ 116 ] 117 118 119 120 121 122 123 124 125 126 127 128 129 |