

|
|

|
Промышленный лизинг
Методички
в варкгитах 2, 5, 7, 9, 10, 12, 17, 18, 23, 25 п 2G пружины с кощ-н\л\ппеи ЮМ жепкости с, в поло-кепнП покоя не деформнро-Еаны, в варна/iTax 13, 14, 19, 22, 24 м 27- 30 в ноложешт покоя НС дсфор\трсват; пр\;кпны с коь41ииисита.\и1 жесткости Су и с. Оире.пел1[ть: :(оф(1ициет сс, харакгориз\югций вязкое сопротивление, осицесчвляеыое в темифере, раииеипе вынужденных колебании системы при заданной частоте но;л1\ и сини; максимальные и резонансные значения алшлитул н:5?уснсп11Я обобн!,СЬтых координаты, скорости м \скорения с нредиололен!!!!, что частота возмущения .oжeт 1змспя1ься. Г1 р I) с1 I11 с Rn вяр1П111,1,\ ко icc. счшат!, ( п.i<iinni>i\in однородными ДН1..Л.\Н1, ПОР/КПН тонкими ()1И0р"1""; KtlCUJIC коле РрО1С>;оДИ I бет С1<0ЛЬ/"<С11ИЯ. Пример иыполксния задания. В,1чпслпть ко,-н!>финпснт а, характер;:.iyionuii г>я !кое coripm i.rneniie, ог\щ(Ч-твляе.мое в демпфере, ьклю-чеином в сис ему / -J в соответствии с рнс. 246. 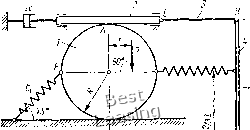 Рнс. 24G Определить уравнение вынужденных колебаний системы при задаинон частоте в()з.\1\1цения р. Найти также максимальные и рсзо иансные значения амплитуд изменеиин обобщенных: координаты, скорости и усксре1И1я. Дано: 20, пи--=5, /;г.,-=2, т-=9 кг; R0,3 м; / = 0,9 м; с, =40 Н/см; с, = 70 П/см, Р = 20 И; x = sinp/, Л =0,1 м, р--4л с 11 = 0,812. Обе пруж1:ны в положении покоя не деформированы. Р е ui с и и е. За o6o6uieHif мо косрдштату примем - угол поворота колеса / (рпс. 247). Уравнение Лагранжа в рассматриваемом случае имеет вид: d /д7 . дТ dt \<J \i Лр, " где Г -5ипетпческая ineprnfl г:н:тсМ1/; Ф -({лпкцмя рассеивания систем;-.! (дмсснпативиая ()yHKHHJi Гс,т;:>), - иотищнальная энергия системы; - обобн1,енная возмун1ак г,ая сила. функции Т, Ф и я вычисляются с точностью до величины второго порядка малости: Т и Ф - относительно обобщенной скорости ср,, /7 - относительно обобщенной координаты (р,. Общий вид этих функций следующий: Г=(1/2)-аф1; Ф=(1/2)-/7ф1; Я = (1/2)-Сфь где а и с - коэффициенты инерции и жесткости системы, а ft -коэффициент, характеризующий сопротивление в системе. 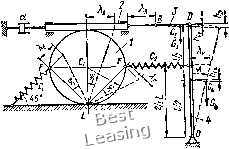 Рис 247 Найдем кинетическую энергию системы как сумму кинетических энергий тел /, 2, 3 и 4. Т = Т, + Т, + Т, + Т,. Кинетическая энергия колеса / (сплошного однородного диска): T, = {l/2).mvl + {l/2)-Jc,.(i>l Vc, = R(ai, Jc,x = i\/2)-miR\ а1 = ц\. Ту = (1/2) • mi/?2(o1 -f (1/2) • (1/2) • mRl - (3/4) • т/Ч!. где т. е. Кинетическая энергия однородного стержня 2, движущегося поступательно: Та = (1 /2). mvl = (m,/2) • (со, • 2RY = 2mR<\. Стержень 3 совершает плоское движение. Мгновенный центр скоростей этого звена при его положении, совпадаютцем с положением покоя, находится в бесконечности. Следовательно, для обеспечения указан1юй выше точности выражения кинетической энергии системы можно считать, что сйа = 0 и Vc3 = vd = Vb = V2. Таким образом. Гз = (1 /2) • mvl = (1/2) • m-jvl = 2тз/?р!. Кинетическая энергия тонкого однородного стержня 4, вращающегося вокруг неподвижной оси Ох t, = (\l2)-j,xm, где j,x = i\i3)-mp; щ = vn/t = v.j[ = • 2r/1 = {2r/1) Ф1, т. е. ti = (1/2) • (1 /3). mj (irl) /р = (2/3) • mrifl Кинетическая энергия всей системы: Т = (3/4) т/фт + 22/41 + 2тз/?Ч + + (2/3) m4/?4i = (1 /2) [(3/2) • mi + А/щ + + (4/3) • рщ = = (1/2)-аф1, где коэффициент инерции системы а = [(3/2) mi + 4m.. + 4тз + (4/3) • m] rk Найдем функцию рассеивания системы: Ф = (1/2) • = (1/2). а {2рц:., = (1/2)4/?2аф1 = (1/2) • йф!, b = 4R-a. Переходим к определению потенциальной энергии системы. В положении покоя (ая/аф1)ф,о = о, поэтому в выражении для П су.м.ма всех членов первого порядка малости равна нулю. Это позволяет непосредственно производить определение потенциальной энергии системы, вычисляя только члены второго порядка малости. Найдем потенциальную энергию системы как сумму работ сил тяжести и сил упругости пружин на перемещении системы из откло-HCiHioro положения, определяемого углом ф,, в нулевое положение, каковым считаем положение покоя системы. Г1ри этом в выражениях для деформации пружин, не загруженных в положении покоя, учитываются только те слагаемые, которые имеют первый порядок малости относительно Ф1, а в выражениях для вертикальных смещений центров тяжести элементов системы -слагаемые, имеющие второй порядок малости. Деформации пружин, загруженных в положении покоя, вычисляются с точностью до величин второго порядка малости включительно. Потощиальная энергия Я1, соответствующая силам тяжести, равна: Я = - ОзЛсз -С4/гс4, где hc3 и /гс4 -вертикальные смещения центров тяжести элементов 3 и 4, вычисленные с точностью до величин второго порядка малости. Из рнс. 247 видно, что ha = 112 - (112) cos ф4 = ( 2) • (1 - cos ф). Ограничиваясь в формуле разложения cos ф4 = 1 - Ф4/2! 4- ф1/4! -... 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 [ 118 ] 119 120 121 122 123 124 125 126 127 128 129 |