

|
|

|
Промышленный лизинг
Методички
Таблица 14
Направляющие косинусы cos(*, 7) = Х ?* = 10,6/19,4= 0,547; cos(R*, 7) = У ?" = 10/19,4 = 0,515; cos , k) ZlR* = -12,8/19,4 = -0,660. Главный вектор показан на рнс. 56. 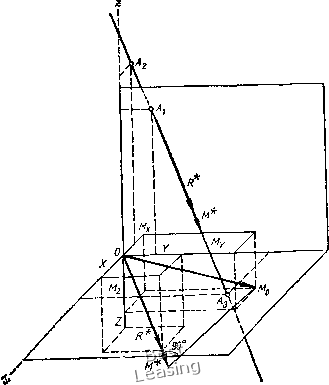 Рис 56 2. Определение главного момента заданной системы сил относительно центра О. Главпые моменты заданной системы сил относительно координатных осей: М., = - Яг = -4 • 50 = -200 Нем; Му = Ра + Рсоа = 4 30+11 •0,8-30 = 384 Нем: = - Рф = -4 50 = -200 11см. Мо = У Ml + My-{-Mi= К(-200)- + 384 + (-200) = 476,9 Нем. Направляющие косинусы: cos (Мо, Т) = MjMo = -200/476,9 = -0,419; COS (Мо, 7) = MjMo 384/476,9 = 0,805; COS (Мо, k) = MjMo = -200/476,9 = -0,419. Главный момент показан иа рис. 56. 3. Вычисление наименьшего главного момента заданной системы сил. XM,i-YM, + ZM, = 0-G - (-200) + 10 381 + (-12,8) (-200) 6 Нсм. 4. Так как R* фО, М* ФО, то заданная система сил приводится к динаме (силовому винту). Уравнение центральной оси: Mj,-iyZ-zY) Му~{гХ-х2) M,-(xY-yX) Ж*
Координаты точек пересечепня центральной осью координатных плоскостей определяем при помощи уравнений цеигральио!! оси (1) и (2). Полученные значения координат помещены в табл. 15, Центральная ось системы сил показана иа рис. 56. Примечание. Если силы приводятся к paвнoдeйcтвvюиcii, т. е. M* = Q, а H=R* =f=Q, то уравнения линии действия равиодемсгв\ющсй: М. yZ-zY\ M,y-=zX-xZ, Ли-xY-yX, где А, Y, Z - проекции равнодействующей силы на координатные оси; My, ЛЬ-главные мо.меиты заданной системы сил относигелоНо координатных а-ей. Из этих трех уривпений иезависимьши являются только два. Таблица 15
Задание С-10. Определение реакций опор твердого тела Найти реакции опор конструкции. Схемы конструкций показаны на рис. 57 - 59. Необходимые для расчета данные приведены в табл. 16. Таблица 16
П р и м е ч а и н я 1. Считать, что в вариантах 16, 18. 22 - 27, 30 петли не препятствуют перемещению рамы вдоль АЬ 2. В вариантах 20, 21 и 28 соприкасающиеся поверхности считать абсолютно гладкими. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 [ 18 ] 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||