

|
|

|
Промышленный лизинг
Методички
Таблица 36
Полученные угловые скорости звеньев механизма сведе1гы втабл, 36. 2. Определение скоростей точек и угловых скоростей звеньев механизма при помощи мгновенных центров скоростей. 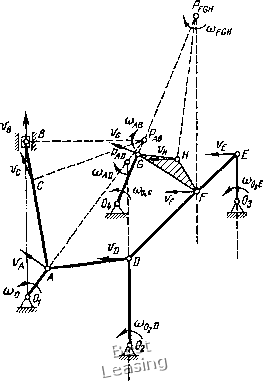 Рис. 102 а) Определен lie положения мгновенных центров скоростей звеньев механизма. Строим механизм в выбранном масштабе (рис. 102). Звенья ОА, OD, ОЕ, O4G вращаются вокруг неподвижных центров О,, Оа, О3, О4. Мгновенный центр скоростей Рав звена АВ находится как точка пересечения перпендикуляров, проведенных из точек Л и Б к их скоростям. Аналогично определяется положение мгновенных центров скоростей Pad и Pfgh- Мгновенный центр скоростей звена DE находится в бесконечности. б) Определение скоростей точек. Скорость точки А va = oiQ-0,A = 2[2 = 2i см/с. Скорости точек звена Л В пропорциональны расстояниям от точек до мгновенного центра скоростей Ран- vaIvb = РавА/РавВ; v/vc = РавА/РавС Расстояния от точек до мгновенного центра скоростей измеряются на чертеже. Пользуясь масштабом длин, получаем; ЯдвЛ = 57см; РдвВ = 41см; ЯлдС = 41,5см. Определяем скорости точек S и С: vb=-va- РавВ/РавА = 24.41/57 = 17,3 см/с; vc = va- PabQPabA = 24 • 41,5/57 = 17,5 см/с. Для определения скорости точки D воспользуемся пропорцией ka/vdPadA/PadD; vd = va-PadD/PadA = 24 • 34,5/47,5 = 17,4 см/с. Так как мгновенный центр скоростей звена DE находится в бесконечности, то vf, = vr=vd=\lA см/с. Для определения скоростей точек G и Н имеем следующие пропорции: vf/va = РгаиР/РнацС; vr/v„ = PfqhPIPfoiiH, отсюда Уо = уЯтояС/Ягая = 17,4-52,8/62,7= 14,6 см/с; = У/г •Р/гоя /Ргая= 17,4-50,8/62,7= 14,1 см/с. Полученные скорости приведены в табл. 35. Одновременно с определением модулей скоростей точек находим их направления, а также направления вращений звеньев механизма. Например, по направлению скорости точки А и положению мгновенного центра скоростей Рав устанавливаем, что вращение звена АВ происходит по часовой стрелке. Поэтому скорость точки В при данном положении механизма направлена вверх. Аналогично определяем направления вращений остальных звеньев и направления скоростей точек механизма (см. рис. 102). в) Определение угловых скоростей звеньев механизма. Скорость любой точки звена равна произведению угловой скорости этого звена на расстояние от точки до мгновенного центра скоростей: va = юлв • РавА = шдп • РлоЛ, отсюда определяем угловые скорости звеньев АВ и AD <ой = У/РлИ = 24/57 = 0,421 с-; «до = va/Рдг.А = 24/47,5 = 0,505 с-. Угловая скорость звена OjD определяется гю скорости точки D ,D = Vo,02D= 17,4/32 = 0,544 с-. Угловая скорость звена DE! при данном положении механизма .равна нулю, так как мгновенный иеитр скоростей звена в этом случае находится в бесконечности: ov.£ =- 0. Аналогично определяем угловые скорости остальных звеньев механизма: соозя = Ve/o,,: = 17,4/18 = 0,967 с-\ oON = VrlPtaiiF - 17,4/62,7 0,278 с (uo,g = VqIO,G== 14,6/20 = 0,730 с \ Полученные угловые скорости приведены в табл. 36. 3. Определение ускорений точек А, В, D* и угловых ускорений звеньев АВ и BD. а) Определение ш, и е,,л (рис. 103). Определяем ускорение точки В при помощи теоремы об ускорениях точек плоской фигуры: Wb = Wa+Wab + wab- Так как кривошип ОА вран1,ается равномерно, то ускорение течки А направлено к центру Oj и равно: Wa -= Wa = О,Л щ -\2 2 = 48 см,с. Центростремительное ускорение точки В во вращательном движении шатуна А В вокруг полю:а А направлено от точки В к точке А и равно: w)iB = AB-mUb = 46• 0,4 = 7,36 см/с. Откладываем от точки В в соответствующем масияабе ускорение полюса Wa- Из Kotnia вектора Wa строим вектор дала, проводя его параллельно В/1. Через конец вектора Wab проводим прямую, перпендикутярную ВА, т. е. параллельную вращательному ускорению Wah- Точка пересечения этой прямой с прямой, по которой направлен вектор ускорения [10.тзуна В, определяет концы векторов Wb и гслд. * \Члоьне чядания предусматрипяет оиредслоиис ускорений точек А, В » углон(<го ускорения iBei:a АВ Одилко а примере о1ределя,01с я также ускорение точки /; и уповое укиреиио 1воиа AD в cootectltbhh l двумя случаями, всгре-чаюилммися в задлча.ч laxoro тиий. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 [ 37 ] 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 |
|||||||||||||||||||||||||||||||||||||||