

|
|

|
Промышленный лизинг
Методички
2 3- 1" iiii J
J \\ж 4---- ------0 / 0 4---- WE \ iiiz-
--£ Pnc 133 Таблица 44
Положительный и отрицательный знаки угловых скоростей означают соответственно направление вращения против хода и по ходу часовой стрелки, если смотреть со стороны положительного направления соответствующей оси. тельно водила обозначим сои- Тогда для колес / и 2 имеем: К - <ui)/«ic = - r-Jr. Для колес 3 и 4 Перемножая (1) и (2), получаем: (cOj - (0i)/(cu4 - (Ol) = - /-2Г4/Г4Г3, CU4 = (Оц = (Oi - ((О4 - (Ol) • /-1Г3 -2/-4. Подставляя в (3) числовые значения, находим: (о„ = 60 - (- 40 - 60) (24 • 40)/(30 • 44) = 60 + 72,7 133 с-. откуда Положительный знак у величины мц показывает, что ведомый вал вращается в направлении против вращения часовой стрелки (если смотреть со стороны положительного направления оси Ог). Для определения угловой скорости са- 2 теллита из (1) определяем сначала его угловую скорость относителыю водила: Ш1с=- (ri -2)-(cui -ODi) 0)1, = - 24/30-(-40-60) = 80 с Абсолютная угловая скорость сател- . Лита причем вектор mi направлен по оси Ог, а (Oic по Ot. Так как wic и cof взаимно перпеггди-кулярны, то «с = У «1+a)fc . = V"60* + 80*=100 c~i. Рис. 134 2. Графическим, способом. Графическое решение задачи основано на том, что движение сателлита может рассматриваться как совокупность двух вращательных движений. При этом в качестве пере- 4---- \ 1 .1 го о 40 СМ: 1 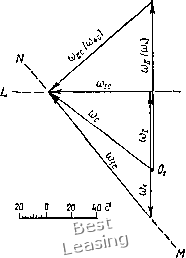 Рис. 135 Рис. 136 поеного движения можно принять не только Bpaniein-ie водила вокруг оси Ог (как в способе Виллиса), но и вращение колеса 1 или 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 [ 50 ] 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||