

|
|

|
Промышленный лизинг
Методички
II. Динамика механической системы ОСНОВНЫЕ ТЕОРЕМЫ ДИНАМИКИ МЕХАНИЧЕСКОЙ СИСТЕМЫ Задание Д-7. Применение теорем об изменении количества движения и о движении центра масс к исследованию движения механическоп системы Тело 2 (рис. 158- 160) приводится в движение приводом, установленным на теле / (варианты 2, 3, 8, 11, 16, 17, 19, 21, 22, 23, 25, 27), или является составной частью самоходной установки (варианты 1, 4, 5, 6, 7, 9, 10, 12, 13, 14, 15, 18, 23, 24, 26, 28, 29, 30); угловая скорость тела 2 изменяется по закону: «2 = «o(l -е О-В начальный момент тело / неподвижно. Найти уравнение движения и скорость v тела 1, если сила сопротивле1П1я, действующая на это тело, /? = Ьи + ?\р. Заданы следующие величины: т, - масса i-ro тела; г,-, Ri - радиусы малых и больших окруж[юстей; b - постоянный коэффициент; / - коэффициент трения скольжения тела / по неподвижной плоскости, Fp = fN; а, р -углы, показанные на рис. 158-160. Во всех вариантах нити считать невесомыми и нерастяжимыми; проскальзыванием нитей и катящихся колес пренебречь. Пример выполнения задания (рис. 161). 1. Применим теорему об изменении количества движения системы к телам /-6: K-7Co=vsf, (1) где Ко, /( - количество движения системы в начальный момент времени / = 0 и в некоторый момент времени t; V Sf - геометрическая сумма импульсов всех внешних сил, действующих иа систему за промежуток времени Так как при / = 0 система находилась в состоянии покоя, то Ко = 0, а следовательно: K-vsf. (2) Проектируя равенство (2) на оси координат, получаем: Kx-Sf,; (За) К, = V S,„. (36) Так как количество движения рассматриваемой системы равно геометрической сумме количеств движения всех тел, входящих в эту систему, то К = ~Ki + 2К, +Хз + К4 + 5 + Ке. 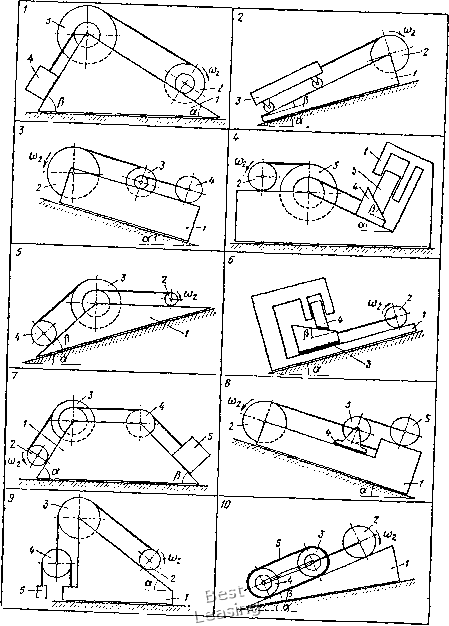 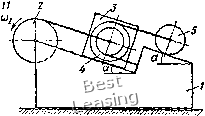 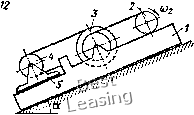 >3 « 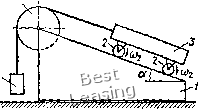 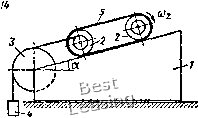 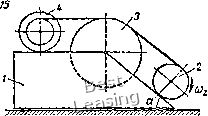  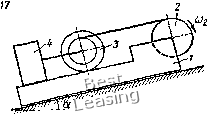 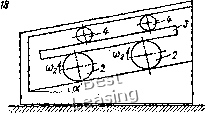 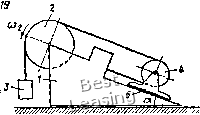 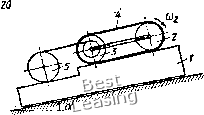 Pile. 159 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 [ 66 ] 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 |