

|
|

|
Промышленный лизинг
Методички
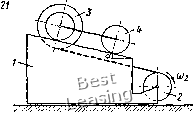 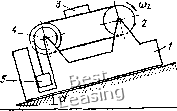 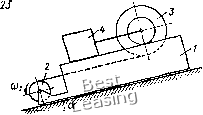 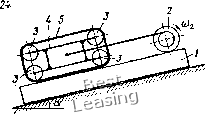      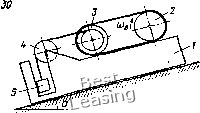 Ркс. 160 Количество движения каждого тела равно произведению массы этого тела на абсолютную скорость движения его центра тяжести (рис. 162). Найдем количества движения тел 1-6. Количество движения тела /: Тело 2 (колеса) и тело 3 (гусеница) имеют общий центр тяжести в точке С., я, скорость которого равна скорости точки С, т. е. Ус2 з = 0Са- Количество движения этих тел обозначим К-2-з, тогда К, 3 = 2К, + Кз = (2т, + т,) Ъс,- Количества движе)1ия тел 4, 5 и 6 равны: Ki = mivc/, Kb = rn-oVc/, Xe = m6Uc., где DC,, vc, vc, DC. - абсолютные скорости центров тяжести соответствующих тел. Неподвижную систему отсчета хОу свяжем с плоскостью (неподвижной), по которой движется тело /, а подвижную систему отсчета 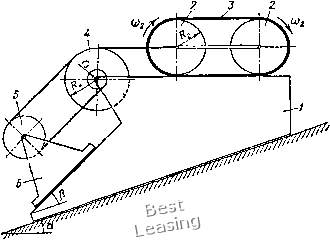 Рис. 161 ,YjO,«/i -с телом /. Абсолютная скорость центра тяжести каждого тела равна геометрической су.мме nepcHocirafl и относительной скоростей, причем скорость тела / явится переносной скоростью для остальных тел, т. е. Абсолютная скорость центра тяжести 3: Vc. = Ve + VC,r = 1 + tlc,r, где vc,r - относительная скорость центров колес Q при качении этих колес без скольжения; модуль этой скорости vc,r = Cu2/?a. Абсолютная скорость центра тяжести С4: Абсолютная скорость центра тяжести Сд.- 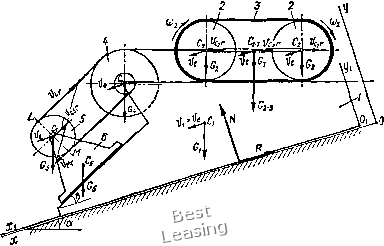 Рис 162 где Ус./-- относительная скорость центра тяжести С5, модуль которой где vir, сд!,. -относителыгые скорости точек L а М тела 5, равные вращательным скоростям соответствующих точек тела 4, т. е. Так как и следовательно, имг = щР2- /"i/Ri. vc,r = (1/2) (CO2R2 - UoR-iIRi) = (1/2) • <02/?2 (I - rjRi). Абсолютная скорость центра тяжести С: 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 [ 67 ] 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 |