

|
|

|
Промышленный лизинг
Методички
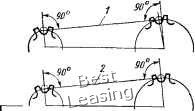 Рис. 4. зависимость динамической силы я jj в приводной роликовой цепи типа ПР шага 31,75 мм от частоты вращения п: 1 - при асинфазном движении; 2 в при синфазном движении 30 2D 10 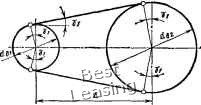 500 Ш т то т0г,,о6/.ан „%р-дл„*Гасчега«ГгТи 2»=""° и округляют до целого (L,), чаще всего до четного числа звеньев, чтобы избежать применения переходных звеньев. Окончательное межосевое расстояние передачи При таком методе расчета нельзя обеспечить синфазное движение звездочек. Кроме того, из-за использования при выводе окончательных формул приближен-1:ых значений тригонометрических функций получаемые величины L н А будут также приближенными. Метод 2 (рекомендуется И. В. Воробьевым) [3]. Расчетная схема цепного контура аналогична методу i (см. рис. 5). В связи с тем, что при выводеокончательных формул приближенные значения тригонометрических функций не используются, то получаемые зависимости для определения L и А являются точными для данной расчеткой схемы. Предварительное число звеньев в цепи где Y) - угол наклона ветвн цепи к оси передачи, градусы; arcsir • Г * / sin ,, I sin т. sinx По окончательно выбранному Lt определяют межосевое расстояние 2 cos 1 г, Ч 22 уЛг -i) 180" Однако метод, как правило, не обеспечивает синфазного движения зве.чдочск. Метод 3 (рекомендуется А. А. Готовиевым) [10, 11). Метод предназначен для проектирования простых и сложных цепных передач с едиными параметрами, обеспечивающими снижение динамических нагрузок, повышение кинематической точности и равномерности движения, а также долговечности. По сравнению с существующими этот метод является более точным и менее сложным. Кроме того, он автоматически ограничивает число межцентровых расстояний и длин цепного контура за счет применения оптимальных их значений. Сущность метода состоит в том, что расчет и построение элементов цепной передачи выполняются по оптимальной кинематической схеме. В основу проектирования исходного цепного контура двух- и многозвездных цепных передач положено обязательное условие: центры элементов зацепления цепи совпадают с центрами впадин зубьев каждой пары смежных звездочек в точках касания их делительных окружностей с осью ведущей ветви, а ее длина всегда кратна шагу цепи, что обеспечивает синфазное движение звездочек. Исходя из длины ведущей ветви It, кратной целому числу звеньев, определяют кинематические поправки 6 и 6 на заданное межцентровое расстояние Ао-величины их зависят от полуразности С или полусуммы диаметров делительных окружностей каждой пары смежных звездочек передачи. Кинематические поправки определяют в зависимости от размещения каждой пары звездочек: при расположении двух смежных звездочек внутри цепного контура (рис. 6) ±6,tV( + Cl-A, о» при расположении двух смежных звездочек внутри и снаружи цепного контура (рис. 7) ~ " (9) Установлено, что этому условию всегда соответствуют определенные значения углов, образованных линией межцентрового расстояния и радиусом делительной окружности, если сопрягаемая ветвь кратна шагу. Эти углы называют углами синфазности и Р,- Последние обеспечивают совпадение центров элементов зацепления и центров впадин зубьев в точках касания шаговой линии в зависимости от действительных значений межцентрового расстояния и длин сопрягаемой ветви цепи. Углы синфазности определяют по формулам: при расположении двух смежных звездочек внутри цепного контура (см. рис. 6) , = -;--Vco = arcctg = arccos (10) 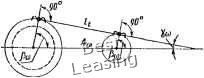 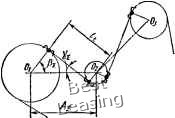 Рис. 6. Схема (расположения двух смежных звездочек внутри цепного контура Рис. 7. Схема различного расположения смежных звездочек внутри и сшруки цепного контура 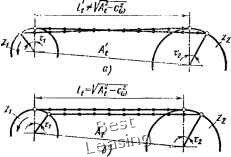 при расположении двух смежных звездочек внутри и снаружи цепного контура (см. рис. 7) Рт = -2~ -VT = arcc!g = arccos- Рис. 8. Схемы двух положений сопрпгаемой ветвн цепн при повороте ведущей звездочки на угловой ша где С(о - полуразность делительных окружностей пары смежных звездочек и шагах; Cj, - полусумма делительных окружностей пары смежных звездочек в шагах; U - длина сопрягаемой ветви цепи в шагах; At - межцентровсе расстояние в шагах. Рассчитанный и спроектированный исходный цепной контур с учетом кинематических поправок и углов синфазности является оптимальным по размещению цепных элементов на звездочках, так как создает условие для более равномерной работы и снижения динамических нагрузок за счет выравнивания угловой скорости ведомой звездочки. На рис. 8 показаны схемы изменения положения ведомой иетвн цепи в цепном контуре при обеспечении межосевого расстояния, рассчитанного по методам 1 и 2 (асинфазное движение, рис. 8, а) и методу 3 (синфазное движение, рис. 8, б). Таким образом, рассмотренный метод, разработанный на основе экспериментальных и теоретических исследований, приведенных в работах [17, 18], позволяет проектировать цепные передачи, обладающие повышенной кинематической точностью (полиграфические машины). Расчет и построение двухзвездных цепных передач В соответствии с зависимостями (8) и (9) для расчета двухзвездных цепных контуров принята единая кинематическая схема (рис. 9), включающая две звездочки с числом зубьев ч гч две сопрягаемые иетви /j и 1, расположенные под углом 7„ к оси межцентрового расстояния. Центры элементов зацепления цени совпадают с центрами впадин зубьев в точках касания шаговой линии вследствие кратности длины иедущей ветви цепи шагу /, а углы синфазности и соответствуют уравнению (10) и табл. П2 приложения. Определение межцентрового расстояния. Согласно схеме (см. рис. 9) и соотношениям (8) и (10) межцентровое расстояние, обеспечииающее работу с повышенной кинематической точностью н равномерностью движения, при распсчо-жении двух смежных звездочек внутри цепного контура определяют по формулам: в шагах = Л„ + АЛ,; Л в мм А - Aft At mnh j где Л(о - единое межцентровое расстояние в шагах, определяемое по формуле (13) Метод расчета разработан А. А. Готовцевым. 0 1 2 3 4 5 6 7 8 9 [ 10 ] 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 |