

|
|

|
Промышленный лизинг
Методички
е. Значения усилий Р,, возникающих в цепной передаче за счет приращения длины ведущей ветви [11]
собственных колебаний на порядок ниже вынужденных, то сила в ведущей ветви определяется формулой [9, 23} (20) В общем случае цепь не подчиняется закону Гука: при увеличении нагрузки в передаче упругое удлинение цепн растет медленнее, чем нагрузка (5J. Однако, поскольку расхождение невелико, для выполнения практических расчетов можно с достаточной достоверностью пользоваться законо.м Гука. Тогда жесткость ветви цепн (21) Значения модуля жесткости £0 Цепи для роликовых цепей типа ПР по ГОСТ 13568-75 составляют [9]: для цепей прн работе под нагрузкой Ев = (2,1-=-2,5) 10 МПа; для цепей, находящихся под действием предварительного натяжения или собственного веса, Еа= (1,05-=-1,25) 10* МПа. Усилие Pi, обусловленное погрешностями изготовления и монтажа передачи, ножет достигать значительной величины (табл. 6), поэтому удлинение Aj ведущей ветвн передачи необходимо ограничивать. Изменение длины Aj ведущей ветвн передачи происходит нз-за радиального биения валов, зубчатых венцов относительно ступиц и наличия зазора между валами и посадочными отверстиями ступиц. 7. Допускаемые значения радиального биения валов 6 цепных передач
При обеспечении хорошего центрирования ступиц ыа валах по посадкам 8 8 и -г=- величина зазора незначительна и ие оказывает существенного влия- ния на изменение длины ведущей ветви Д;. Радиальное биение валов контролируют индикаторами часового типа предварительно при установке валов в центрах и окончательно после монтажа передачи. Величина радиального биения бв не должна превышать значений, приведенных в табл. 7, а радиальное биение звездочек - величин, указанных в табл. 24 гл. 4. Удлинение ведущей ветви цепн можно определять по приближенной формуле Д,«0,5 7Су(Дв-Ь 0,5Да), (22) где Ав и Дз - суммарные радиальные биения соответственно валов и эвездочея передачи. Усилия в зацеплении При нормальном положении звеньев цепи на зубьях звездочки условия рав-швесия для всех шарниров цепи идентичны. Рассмотрим равновесие шарнира »", находящегося под действием натяжений смежных звеньев Oz+j и Qi, центробежной силы f ц и реакции Ni, направленной под углом трения рк к нормали основного профиля зуба (рис. 7). Условие равновесия в системе координат XOY имее» вид 5] Л = cos т-• Qi+i cos т - Л/, cos (т-f-у-f Рк) = 0; 5] У = sin т 4- Qfrf sin т - Л/г sin (т -f -v -f рк) ц = 0; f ц = 25ц sin т. (23) После решения системы (23) получим формулы для определения усилий (25} где а - коэффициент натяжения; b - коэффициент сцепления. Коэффициенты натяжения а и сцепления b определяют по формулам sin (у + Рк) . sin (a + v + p„) sin Иг sin(a4-Y-fPK) • (26 (271 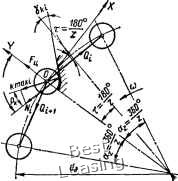 Рис. 7. Схема определения усилий при зацеплении втулочно-роликовой цепи со зводочкой ЛИЙ в шарнире звездочки: i при Натяжение в первом звене цепи, прилегающем к ведущей ветви передачи в момент, когда в зацепление с зубом звездочки начинает входить новое звено, равно натяжению ведущей ветви Si. Применив уравнения (24) и (25) для определетш усилий последовательно к 1, 2, .... i шарнирам, получим формулы для определения максимальных усилий в шарнире с номером i: Qui = {Si-S„)a + S; A, = (Si-S„)fc. Подставив в полученные выражения величину иатяжеиия Si ведущей ветви в соответствии с формулой (16), получим окончательные выражения для определения максимальных уси-положении звеньев цепи на зубьях нормальном Qin = (kyP + S2f)a + S. (28) Ni = {kyP + S2f)b. (29) При настройке передачи по схеме положения звеньев, указанной на рис. 6, контакт звеньев, начиная с некоторого номера i, происходит с нерабочей частью зуба, а усилие Ni (в отличие от схемы, представленной иа рис. 7) действует в противоположную сторону, увеличивая усилие Qi+i по сравнению с Qi- При решении приведенной задачи получены формулы для определения усилий Qi+i и Ni в звеньях с номером i > /: Qui = (Sa - 5ц) а"* -Ч 5ц = Saf+ «ц! (30) Nl-={S2-S)b"- = S2lb"-, (31) где т - общее число шарниров цепи, находящихся в зацеплении с зубьями звездочки. Номер шарнира /, разграничивающий область применения выражений (28)- (31), определяют по зависимости . jn 1 / - о о kyP±S In а Нагрузка на валы передачи. Валы передачи нагружаются усилиями иатяжеиия ведущей Si и ведомой ветвей передачи и разгружаются центробежным натяжением .8ц. Нагрузку на валы Рв определяют как геометрическую сумму сил по формуле (рис. 8) Рв = VikyP + Sff + S2f + 2 (kyP + Sf) Sf cos Тш- Для горизонтальных и наклонных передач величину усилия Рв можно приближенно определять из выражения PB{l,l5-i-l,20)kyP, а для вертикальных по зависимости />в ~ 1,05 ky.P. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 [ 76 ] 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 |
|||||||||||||||||||||||||||||||||||||||||||