

|
|

|
Промышленный лизинг
Методички
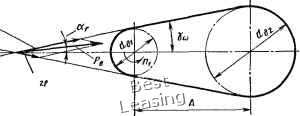 Рис. 8. Схема определения усилий, действующих па валы цепной передачи Угол щ между направлением действия силы Рв и осью передачи составляет (см. рис. 8) , Sjf sin 2Vfi, af = Та - arcsin " p-! • Угол обхвата звездочек цепью. Важнейшим условием обеспечения правильной и долговечной работы цепной передачи является обеспечение оптимальных величин углов обхвата Pj и Pj цепью звездочек, которые зависят от числа шарниров т± и «2, находящихся в зацеплении с зубьями звездочек. Угол обхвата Р и число находящихся в зацеплении с звездочкой шарниров т связаны зависимостью 360°т Pz Р = - или т = 360° где т - целое число. Если натяжения ведущей Si и ведомой Sg ветвей известны, то при нормальном положении звеньев цепи на зубьях звездочки число звеньев т, находящихся в зацеплении с зубьями звездочки, определяют по формуле т = In а При этом величину т округляют до меньшего целого значения. Углы обхвата звездочек цепью ввиду провисания холостой ветви передачи меньше теоретических значений на некоторую величину % [30]: Pi=PiT -Z: f>2=2r - %. Pit = 2 arccos -ШШ-; рт = 360° - pj,. При определении величины угла % исходят из того, что при малых значениях стрелы провисания /а ведомая ветвь передачи имеет форму, близкую к параболе, которая с достаточной степенью точности аппроксимируется дугой радиуса Rf (рис. 9). Зависимости, описывающие форму провисания ведомой ветви передачи имеют вид (см. рис. 9): 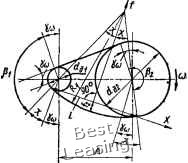 уравнение параболы (ошибка 2,5%) и аппроксимирующей окружности (ошибка 6 %) при / < 1,5 Rf Рцс. 9. Схема определения параметров цепной передачи с учетом провисания ведомой ветви где Rf 2Rf lOS, gq cos (32) (33) «2 - угол наклона ведомой ветви к горизонту; выражение связи между натяжением ведомой ветви и стрелой провисания /2 в ее центре (34) Где Of = lOgql cos «2-приведенный вес ведомой ветви. Формула для определения угла / имеет вид Х = arcsin -g = arcsin : arcsm (35) Рассмотренная аппроксимация параболы окружностью возможна, если натяжение ведомой ветви удовлетворяет неравенству (36) S2 > OfilQf, что выполняется при относительной стреле провисания ведомой ветви < 0,19 и угле X < 50°. Рассматривая угол обхвата Pi на меньшей звездочке, можно выделить следующие наиболее важные его значения: максимальное теоретическое значение Pixmax = 180°; минимальное теоретическое значение (для передач, спроектированных в соответствии с методикой, изложенной в гл. 2) PiTmin = 120°; минимальное возможное значение: если малая звездочка является нижней, Рщип =70°-ф; если малая звездочка является верхней, Pimm = 70°ф. При этом значение угла обхвата Pj на большей звездочке составит: минимальное теоретическое значение Раттт = 180°; максимальное теоретическое значение (для передач, спроектированных в соответствии с методикой, изложенной в гл. 2) Ргттах = 240°; минимальное возможное значение: если большая звездочка является нижней, Ргтш = 130° - ф; если большая звездочка является верхней, P2tnin = 130°-(-ф. Коэффициент полезного действия передачи Приводные цепи обладают высокн.м коэффициентом полезного действия (КПД), который с увеличением скорости движения цепи, ухудшением условий смазки и возрастанием динамических нагрузок снижается. Для двухзвездной передачи при обильной смазке = 1) и спокойной нагрузке {ky= 1) значения КПД составляют: Г] = 0,95-0,97 при t) < 10 м/с; Г] = 0,92-0,94 при t)> 10 м/с; для зубчатых цепей ч] = 0,98 -4- 0,99. Ориентировочное значение КПД передачи в зависимости от параметров цепи и режима работы определяют по формуле [10] d и+1 t и где f- коэффициент трения в шарнире цепи; для роликовых цепей /= 0,14-rt-0,28, а для зубчатых с шарнирами качения = 0,01-т-0,05. Для миогозвездных передач, а также для двухзвездных передач с натяжными или оттяжными звездочками ориентировочное значение КПД можно определить по формуле . Г m 4=1-iPii+Pi,+sai-i) , где Р - полезная нагрузка, передаваемая первой ведущей ветвью передачи; т - число звездочек в цепном контуре; Рц; Я/2 - полезные нагрузки в сбегающей и набегающей ветвях цепи; ii - коэффициент гибкости цепи при огибании евездочки. Коэффициент гибкости для роликовых цепей [3] d,+d + 0.5DtgT;) d„i-/(d-f 0,5DtgT,) • Для роликовых цепей по ГОСТ 13568-75 и ГОСТ 21834-76 D=2d, поэтому коэффвцнент гибкости можно определять по формуле 2fd sin Tf С учетом этого для многозвездных передач с роликовыми цепями по тест 13568-75 и ГОСТ 21834-76 величина КПД 2 sin Xl {Рц + Pn + 25ц) (i -f tg X,) U (=1 Натяжение в ведомой ветви в процессе работы передачи Чтобы звенья цепи на зубьях звездочки находились в равновесии, натяжение Si ведомой нетви должно быть больше остаточной силы Pq от натяжения Sf ведущей ветви [30]: (37) В противном случае последний шарнир цепи, находящийся под действием разности натяжений Qm и и реакции от усилия в зацеплении Nm, вследствие наличия равнодействующей силы Р„ (Ук > Рк). направленной вдоль зуба (рис. 10), начнет подниматься по зубу. Если половина угла заострения вершины зуба <Ук 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 [ 77 ] 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 |