

|
|

|
Промышленный лизинг
Методички
Глава VII ДИНАМИКА КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА § 27. ОБЩИЕ СВЕДЕНИЯ Динамический расчет кривошипно-шатунного механизма заключается в определении суммарных сил и моментов, возникающих от давления газов и сил инерции. По этим силам рассчитывают основные детали на прочность и износ, а также определяют неравномерность крутящего момента и степень неравномерности хода двигателя. Во время работы двигателя на детали кривошипно-шатунного механизма действуют силы давления газов в цилиндре, силы инерции возвратно-поступательно движущихся масс, центробежные силы, давление на поршень со стороны картера (приблизительно равное атмосферному давлению) и силы тяжести (силы тяжести в динамическом расчете обычно не учитывают). Все действующие в двигателе силы воспринимаются полезным сопротивлением на коленчатом валу, силами трения и опорами двигателя, В течение каждого рабочего цикла (720" для четырех- и 360° для двухтактного двигателя) силы, действующие в кривошипно-шатунном механизме, непрерывно изменяются по величине и направлению. Поэтому для определения характера изменения этих сил по углу поворота коленчатого вала их величины определяют для ряда отдельных положений вала обычно через каждые 10-30°. Результаты динамического расчета сводят в таблицы. § 28. СИЛЫ ДАВЛЕНИЯ ГАЗОВ Силы давления газов, действуюнше на площадь поршня, для упрощения динамического расчета заменяют одной силой, направленной по оси цилиндра и приложенной к оси поршневого пальца. Ее определяют для каждого момента времени (угла ф) по действительной индикаторной диаграмме, снятой с двигателя, или по индикаторной диаграмме, построенной на основании теплового расчета (обычно для номинальной мощности и соответствукяцей ей частоты вращения коленчатого вала). Перестроение индикаторной диаграммы в развернутую по углу поворота коленчатого вала обычно осуществляют по методу проф. Ф. А. Брикса. Для этого под индикаторной диаграммой строят вспомогательную полуокружность радиусом R = S/2 (рис. 48). Далее от центра полуокружности (точка 0) в сторону и. м. т. откладывают поправку Брикса, равную RK/2. Полуокружность делят лучами из центра О на несколько частей, а из центра Брикса (точка О) проводят линии, параллельные этим лучам. Точки, полученные на полуокружности, соответствуют определенным углам ф (на рис. 48 интервал между точками равен 30°). Из этих точек проводят вертикальные линии до пересечения с линиями индикаторной диаграммы и полученные величины давлений откладывают на вертикали соответствующих 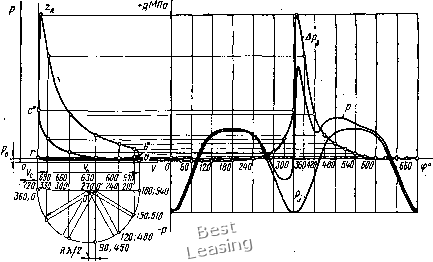 J90;J0 420:60 Рис. 48. Перестроение (развертка) индикаторной диаграммы в координаты р - Ф углов ф. Развертку индикаторной диаграммы обычно начинают от в. м. т. в процессе хода впуска. При этом следует учесть, что на свернутой индикаторной диаграмме давление отсчитывают от абсолютного нуля, а на развернутой показывают избыточное давление над поршнем ДРг = Pv~ Ро- Следовательно, давления в цилиндре двигателя, меньшие атмосферных, на развернутой диаграмме будут отрицательными. Силы деления газов, направленные к оси коленчатого вала, считаются положительными, а от коленчатого вала - отрицательными. Сила дарения (МН) на поршень /г = (Рг-Ро)>ш (165) где FJ площадь поршня, м*; р м Ро - давление газов в любой момент времени и атмосферное давление, МПа. Из уравнения (165) следует, что кривая сил давления газов по углу поворота коленчатого вала будет иметь тот же характер изменения, что и кривая давления газов Ар. Для определения газовых сил по развернутой диаграмме дав-ленийАр,, необходимо пересчитать масштаб. Если кривая Ар построена в масштабе М МПа в мм, то масштаб этой же кривой для будет Мр = MF МН в мм. § 29. ПРИВЕДЕНИЕ МАСС ЧАСТЕЙ КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА По характеру движения массы деталей кривошипно-шатунного механизма можно разделить на движущиеся возвратно-поступательно (поршневая группа и верхняя головка шатуна); совершающие вращательное движение (коленчатый вал и нижняя головка шатуна) и 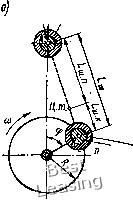 Рис. 49. Система сосредоточенных масс, динамически эквивалеитиая кривошип- ио-шатуииому механизму: а -приведенная система кривошипно-шатунного механизма, б -приведение масо кривошипа совершающие сложное плоскопараллельное движение (стержень шатуна). Для упрощения динамического расчета действительный кривошипно-шатунный механизм заменяется динамически эквивалентной системой сосредоточенных масс. Массу поршневой группы m„ считают сосредоточенной на оси поршневого пальца в точке А (рис. 49, а). Массу шатунной группы заменяют двумя массами, одна из которых (m.J сосредоточена на оси поршневого пальца в точке А, а другая (т.) - на оси кривошипа в точке В. Величины этих масс (кг) / m.u = iLm.JLjfrhn: «ш.к = (ш.п/ш)«ш. (166) где Ln, -- длина шатуна; L.k- расстояние от центра кривошипной головки до центра тяжести шатуна; £,ш.п - расстояние от центра поршневой головки до центра тяжести шатуна. Для большинства существующих конструкций автомобильных и тракторных двигателей /Пш.п= (0,2 0,3) т,ат.к (0,7 -=г 0,8)тш. При расчетах можно принимать средние значения = 0,275«v, m„,.=0,725mn,. - (167) Массу кривошип а заменяют двумя массами, сосредоточенными на оси кривошипа в точке В (mJ и на оси коренной шейки в точке О (щ) (рис. 49, б). Масса коренной шейки с частью щек, расположенных симметрично относительно оси вращения, является уравновешенной. Масса (кг), сосредоточенная в точке В: /"к =/"ш.ш + 2тщР/7?, (168) где гщ.ш - масса шатунной шейки с прилегающими частями щек; Шщ - масса средней части щеки по контуру abed, имеющей центр тяжести на радиусе р. У современных короткоходных двигателей величина мала по сравнению с т.ш и ею можно в большинстве случаев пренебречь. При расчетах т. и в необходимых случаях Шщ определяют исходя из размеров кривошипа и плотности материала коленчатого вала. Таким образом, система сосредоточенных масс, динамически эквивалентная кривошип но-шатунному механизму, состоит из массы nij = /Ид + /"ш-п, сосредоточенной в точке А и имеющей возвратно-поступательное движение, и массы mj? =/n-f/Пш.к, сосредоточенной в точке В и имеющей вращательное движение. В V-образных двигателях со сдвоенным кривошипно-шатунным механизмом ~ = /«к + 2тш.к. При выполнении динамического расчета двигателя значения т.„ и Шщ принимают йо данным прототипов или же подсчитывают по чертежам. Для приближенного определения значений т, тщ и можно использовать конструктивные массы т = m/Fji (кг/м* или г/см*), приведенные в табл. 21. Таблица 21
При определении масс по табл. 21 следует учитывать, что большие значения т соответствуют двигателям с большим диаметром цилиндра. Уменьшение S/D снижает m и т; V-образным двигателям с двумя шатунами на шейке соответствуют большие значения т. § 30. силы ИНЕРЦИИ Силы инерции, действующие в кривошипно-шатунном механизме, в соответствии с характером движения приведенных масс подразде-лякуг на силы инерции поступательно движущихся масс Pj и центробежные силы инерции вращающихся масс Кц (рис. 50, а). Сила инерции от возвратно-поступательно движущихся масс mjj = - mjRa (cos ср -f X cos 2ср). Аналогично ускорению поршня сила Pj может бьггь представлена в виде суммы сил инерции первого Рц и второго Рщ порядков: Pj = P/i +Рц\ = - (tnjRa cos ср + nijRaiX cos 2cp). (170) В уравнениях (169) и (170) знак минус показывает, что сила инерции направлена в сторону, противоположную ускорению. Силы инер- ции возвратно-поступательно движущихся масс действуют по оси цилиндра и как силы давления газов," являются положительными, если они направлены к оси коленчатого вала, и отрицательными, если они направлены от коленчатого вала. Кривую силы инерции возвратно-поступательно движущихся масс строят аналогично кривой ускорения поршня (см. рис. 47). Расчеты Рдолжны производиться для тех же положений кривошипа (углов ф), для которых определялись Центробежная сила инерции, вращаюшлхся масс 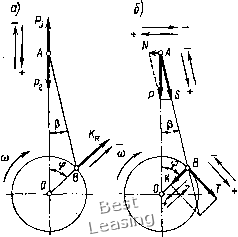 Рис. 50. Схема действия сил в кривошипно-шатунном механизме: а - инерционных и газовых; б - суммарных KB = -mnR(o (171) постоянна по величине (при ю = const), действует по радиусу кривошипа и направлена от оси коленчатого вала. Центробежная сила инерции Кн является результирующей двух сил: силы инерции вращающихся масс шатуна Кнш= - m„,R(i) и силы инерции вращающихся масс кривошипа Krk = - tnR(i>. Для V-образных двигателей Квг = Krk + Кнт.я+ Квт.п = - (П + "Ьа-к.л +/"ш-к.п) (172) (173) (174) где Кнш.а и Кнш.п - силы инерции вращающихся масс левого и правого шатунов. Для V-образных двигателей, у которых два одинаковых шатуна расположены рядом на одной шейке: Kr = /Снк + 2/Снш = - ("к + 2m„. J = - mR<o\ (175) § 31. СУММАРНЫЕ СИЛЫ, ДЕЙСТВУЮЩИЕ В КРИВОШИПНО-ШАТУННОМ МЕХАНИЗМЕ Суммарные силы (кН), действующие в кривошипно-шатунном механизме, определяют алгебраическим сложением сил давления газов и сил возвратно-поступательно движущихся масс: PP, + Pi. (176) При проведении динамических расчетов двигателей целесообразно пользоваться неполными, а удельными силами, отнесенными к единице площади поршня. В этом случае удельные суммарные силы (МПа) определяют путем сложения избыточного давления над поршнем Дрр (МПа) и удельных сил инерции ру(МН/м = МПа): p = Ap, + Pj, (177) Pi = Pj/Pn = - (mjRmVF) (cos 9 + X cos 2(p). (178) Графически кривую удельных суммарных сил р строят с помощью диаграмм Дрг= /(ф) Pj = /(?) (см. рис. 48). При суммировании этих диаграмм, построенных в одном масштабе Afp, полученная диаграм-» ма р будет в том же масштабе. Суммарная сила Р, как и силы Р и Pj, направлена по оси цилиндра и приложена к оси поршневого пальца (рис. 50, б). Воздействие от \ силы Р передается на стенки цилиндра перпендикулярно его оси и на шатун по направлению его оси. Сила Л(кН), действующая перпендикулярно оси цилиндра, называется нормальной силой и воспринимается стенками цилиндра: NPig% (179) Нормальная сила считается положительной, если создаваемый ею момент относительно оси коленчатого вала направлен противопо-ложно направлению вращения вала двигателя. Сила S (кН), действующая вдоль шатуна, воздействует на него и далее передается кривошипу. Она считается положительной, если сжимает шатун, и отрицательной, если его растягивает: S = P(l/cosP). (180) От действия силы S на шатунную шейку возникают две составляющие силы (рис. 50, б): сила, направленная по радиусу кривошипа (кН): /С =. Рсо8(ф + p)/cos?, (18ГК Ц тангенциальная сила, направленная по касательной к окружноёти радиуса кривошипа (кН): Т = Р81п(ф + P)/cosp. (182) Сила К считается погожительной, если она сжимает щеки колена. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 [ 20 ] 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 |
||||||||