

|
|

|
Промышленный лизинг
Методички
Дестичный под Моияный код 7 8 У йВошно-десятииный мд -t 5281 SO 372 Рис. 15. Виды кодирвьаиия числвввй информации продолжение) . опременных станках с ЧПУ отечественного и зарубежного производства, надо запи-наименование символов[3]. На рис. 15,в надо прочесть и выписать числа, записан-1.11- и различных кодах на верхних кадрах перфоленты, а на ее нижних кадрах запи-и11. 1ачерненными кружками в соответствующих кодах указанные в квадратах числа. Общие виды и кинематические схемы станков. Контурные общие виды и немые ншматнческие схемы металлорежущих станков, их отдельных агрегатов и станков м .лектрофизической обработки материалов приведены на рис. 16-125. Заполне-11. лих рисунков производится в основном в соответствии с ранее сделанными иомендациями по проведению лекций и других видов занятий. При этом исполь-\и,та\ учебные пособия [6, 9]. Однако заполнение некоторых рисунков имеет свои ».Гк11Н0сти как в отношении специфики их изучении, так и в части рекомендуемой ной цели литературы. Токарно-винторезный станок модели 1И611П (рис. 16 и 17) достаточно подробно ii 1..цен в работе [/1, а станок модели 16К20 (рнс. 20 и 21) - в работе [ISJ. При изу-jiMiiii моделей металлорежущих станков с числовым программным управлением >и. 19, 20, 44-47, 64 и 63) рекомендуется использовать справочник 112 ]. Конструк-1111 и кинематика токарно-затыловочного станка модели 1811 (рис. 24 и 25) может мм. 11.!учена по книге [oJ и учебному пособию [14]. Материалы для изучения одно- !......дельного токарно-револьверного автомата модели 1Б136 (рис. 38 и 39) имеются \11Гр1юм пособии [14]. Широкоуииверсальный фрезерный станок модели 6M8311I 111 04 н 65), а также бесконсольпый вертикально-фрезерный станок модели 656 (рис. 66 и 67) освещены в работе [4]. При заполнении схем настроек делительных головок (рио. 76 и 77) можно использовать брошюру [lOJ. При этом на рис. 76 следуе! обозначить н записать наименования и назначение отдельных частей делительных головок универсального и оптического типов и указать области их применения, а на рис. 77 пометить способы закрепления отдельных элементов кинематических цепей, закрасить в зеленый цвет (как взаимосвязанное движение) ге элементы кинематических цепей, которые при данном методе работы участвуюг в передаче движения. Для каждого метода деления и для нарезания винтовых канавок надо записать формулы расчета. На схеме (рис. 77, д), показывающей поле зрения в окуляре оптической делительной головки, нужно только записать с точностью до Г угол поворота шпинделя головки. Вертикальный зубоЛрезерный станок модели 5К324Л (рио. 102 и 103) описай в учебном пособии 14 J. При изучении зубошлифовального станка модели 5А832 (рис. 112 и 113) рекомендуется дополнительно использовать учебник [2]. Принципы компоновки и кинематические схемы узлов агрегатных станков (рис. 114 и 115) дополнительно следует изучать по справочному пособию [11 ]. При заполнении схем станков для анод1ю-механической резки металлов (рис. 122), члектроискрового станка (рис. 123), электроимпульсного стапка (рис. 124) и станка для ультразвуковой обработки (рнс. 125) рекомендуется использовать работу [1J. 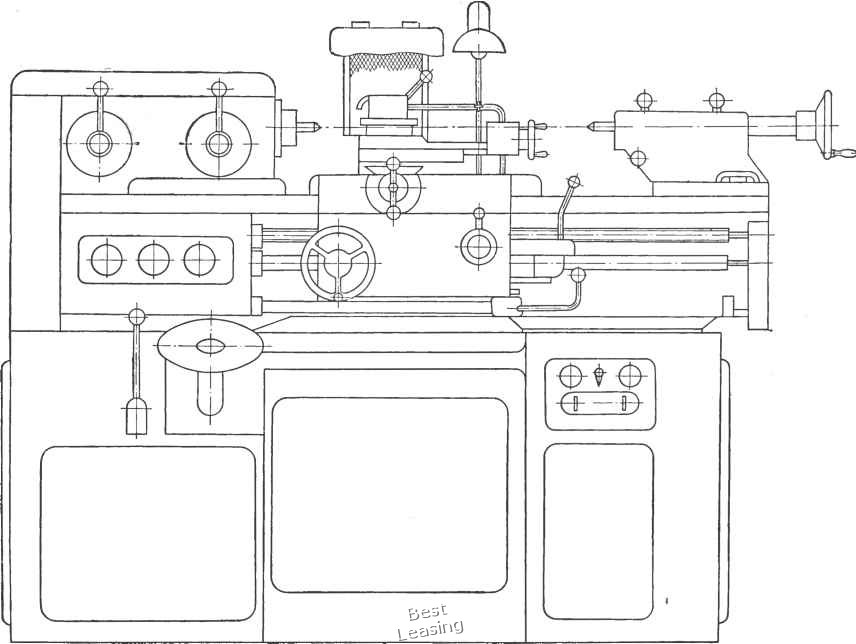 Рис. 16. Общий вид гокарно-винторезиого станка модели 1И611П 0 1 2 3 4 5 6 [ 7 ] 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 |