

|
|

|
Промышленный лизинг
Методички
Клиноплунжерные механизмы-усилители. Одно- и двухплунжер-ные механизмы применяют как усилители привода приспособлений, многоплунжерны.е механизмы - как центрируюихие механизмы патронов, оправок. На рис. III.24, а дана схема механизма с односкосым клином и двухопорным плунжером без роликов. Рассмотрим равновесие плунжера, а не клина и найдем зависимость между силой зажима W и исходной силой Q привода. При равновесии плунжера P=N; W==W,-F,=W,-Ntgf,. 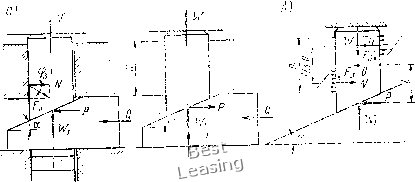 Рис. III.24. Схемы для расчета клиноплунжерного механизма с двухопорным плунжером (а) и с консольным плунжером (б) Заменив в формуле Лна Р, получим U7 = ri-Ptgtp3. Значения Wi и Р определяются по формулам: W,=Q- tg (а-f-?i) 4-tg ?2 Подставим значения Wi и Р в формулу равновесия плунжера: 1 1 Q -tg(a+cpi)tgtp3. tg (а-f-<pi) 4-tg ?2 " tg (a 4-?i)-f-tg 2 После преобразования получим окончательную формулу tg (а 4-?i) 4-tg f 2 Для механизма с односкосым клином и консольным -плунжером (рис. III.24, б) силу зажима W определяют по приведенной формуле, но в формулу вместо коэффициента трения tg(f3 подставляют приведенный коэффициент трения tg93np: W-Q 1 -g(" + y)gy3np tg(a + ?i) + tg?2 Замена tgrps па tgфзпp объясняется тем, что условия трения консольного плунжера отличаются от двухопорного плунжера. Значение коэффициента трения 1дфзпр можно определить при рассмотрении сил, действующих на консольный плунжер (рис. III.24, б). Сила Р создает перекос плунжера, т. е. она стремится повернуть его относительно средней точки О (на величину зазора) и создает давления, распределенные в виде треугольников. Равнодействующие N этих давлений находятся от вершин треугольников на расстоянии (1/3) а; а расстояние между равнодействующими силами N равно (2/3) а. Значение приведенного коэффициента трения tgфзпp «айдем при равновесии плунжера, когда моменты сил Р и N относительно точки О равны. Следовательно, PlN {2,3) а. Подставим в равенство значение N: тогда P/ = (/3,tgT3)(2/3)a 2/3=P(3 a)tg=p3 = /tgcp3np, откуда tg?3„p=(3 a)tgcf3. Здесь а -угол наклона плоскости клина; d -диаметр оси ролика, мм; /) -наружный диаметр ролика; d/D = 0,5; / - расстояние от средней точки контакта консольного плунжера с клином до середины направляющей плунжера; а -длина направляющей консольного плунжера; а = 0,7; tgфз -коэффициент трения двухопорного (неперекошенного) плунжера; фз -угол трения двухопорного плунжера; ig(f2 - коэффициент трения на горизонтальной плоскости клина; ф2 -угол трения на горизонтальной плоскости клина; ф1 - угол трения на наклонной плоскости клина; в основном углы трения равны, т. е. ф1 = ф2=фз. На рис. III.25, а-г даны четыре схемы клиноплунжерных механизмов с одним плунжером и роликами. Для таких механизмов сила зажима W=Q ~g23 tg(a-f-?i) + tg?2 но с заменой угла и коэффициентов трения приведенными коэффи-центами фщр, tgф2пp и tgфзпp: для механизма (рис. 111.25, а) с двухопорным плунжером и одним роликом в формулу вместо ф подставляют приведенный угол трения ф1пр= arctg tgфl(d/D), tg фшp = tgфl(d/D) и тогда формула примет вид W=Q - (" + fi пр) tg ?з . tg(a+ifi„p)tgif2 для механизма (рис. III.25, б) с консольным плунжером и одним роликом в формулу вместо угла ф1 и 1§фз подставляют фщр и tg(fзпp = tgфз (3 с) и формула примет вид \у/ц -g(«+ Pi..p)tgtp3(3 a) . tg(a + -finp) + tgtp2 для механизма (рис. 111.25, в) с двухопорным плунжером и двумя роликамиВ формулу вместо ,ф1 и tgф2 подставляют фшр и tgф2пp = tgф2(cf/D) п формула примет вид 1 -tg(a-f yi,.p)tgy3 . 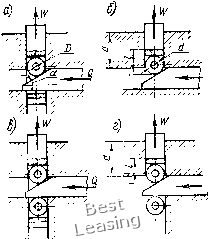 W = Q для механизма (рис. III.25, г) с консольным плунжером и двумя Q роликами в формулу вместо ф], tg ф2 и tg фз подставляют их приведенные значения фщр, tgф2пp и tg93np, тогда сила зажима . Многоплунжерные самоцент-Jj£ рирующие механизмы. В многоплунжерных самоцентрирующих механиз.мах, патронах, оправках суммарную силу зажима Wcyn определяют по тем же формулам, Рис. III.25. Схе.мы клиноп.пуижерных что н ДЛЯ одноплунжерных меха-механпз.мов: низмов, Но в основной формуле и а-с двухопорным плунжером и одним ЧагТНЫХ ЗНЯЧРНИЯХ t0-ro9 = O роликом; б -с консольным плунжером и о 4dHHbb\ JHdHKHdHA 1уф2 -и одним роликом; в-с двухопорным плун- исключают, так как В ЭТОМ случзе жером и двумя роликами; г - с консоль- кым плунжером и двумя роликами ВСб КОНСОЛЬНЫе ПЛунжерЫ, раС- положенные вокруг многоскосого клина и равномерно нажимающие на его наклонную поверхность, при зажиме детали не оказывают давления на его горизонтальную опорную поверхность. Следовательно, для многоплунжерного механизма с ко-нсольны-ми плунжерами без роликов суммарная сила зажима -П 1 - tg (а + yi) tg уз пр ""-" tg(a-f,i) Сила зажима каждым плунжером где п - число плунжеров в приспособлении. Условия самотор.можения для многоплунжерных механизмов при / = 0,1; для механизмов без роликов а5°43; для механизмов с роликами а2°50. Многозвенные механизмы с гидропластмассой. На рис. III.26 показано многозвенное многоплунжерное приспособление (оправка), внутренняя полость которой заполнена гидропластмассой. В отверстия корпуса / оправки вставлены плунжеры 2. При подаче сжатого воздуха в правую полость пневмопривода (на рисунке отсутствует) поршень со штоком и тягой 4, перемещаясь влево, нажимает на гидропластмассу, которая раздвигает плунжеры 2 от центра И деталь 3 зажимается. Тогда в полости с гидропластмассой многоплунжерной оправки возникает гидростатическое давление р [Па (кгс/см)], а тяга 4 и зажимные плунжеры 2 не перемещаются. 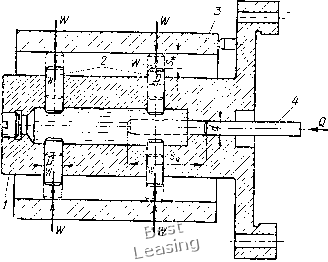 Рис. 111,26. Схема к расчету многоплунжерной оправки с гидропластмассой Сила давления тяги 4 на гидропластмассу На каждый плунжер 2 гидропластмасса давит с силой Разделив формулу для определения силы W на формулу для определения силы Q, получим Из этой формулы найдем зависимость между силами W и Q с учетом КПД где Q - исходная сила на штоке механизированного привода, Н(кгс); D -диаметр зажимного плунжера, см; rf -диаметр тяги, см- Г] = 0,9 -коэффициент полезного действия привода. величина перемещения тяги 4 и плунжеров 2 при зажиме детали 3 определяется равенством объемов гидропластмассы, перемещаемой тягой под плунжеры, следовательно, откуда рде Sq -величина перемещения тяти 4 при зажиме плунжерами, мм; Sw -величина перемещения каждого рабочего плунжера при зажиме детали, мм; п -число зажимных плунжеров. 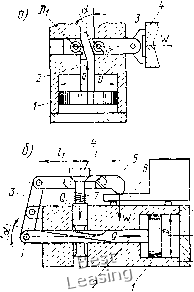 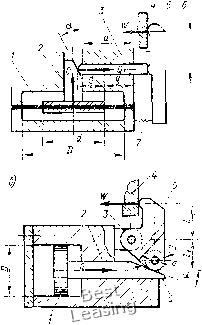 Рис. II 1.27. Схема к.аино-плунжерного усиливающего зажимного устройства: а -с двухопорным п.пунжером и двумя роликами; б - с односкосым клпном н двухопорным плунжером Рис. III.28. Схемы зажимных устройств с пневмоприводом: а - схема клиноплунжерного механизма-усилителя с односкосым клипом и с консольным плунжером; б - схема зажимного устройства с прихватом и пневматическим приводом На рис. 1И.27, а дана схема клиноплунжерного усиливающего устройства с двухопорным плунжером 3 и двумя роликами. При подаче сжатого воздуха в бесштоковую полость пневмоцилиндра поршень / со штоком 2 перемещается вверх и шток 2 клиновым концом, нажимая на правый ролик, переместит плунжер 3 вправо, и он качающимся башмаком зажмет деталь 4. Во время подачи сжатого воздуха в штоковую полость пневмоцилиндра поршень / со штоком 2 переместится вниз и шток 2 клиновым концом, нажимая на левый ролик, переместит плунжер 3 с башмаком влево, и деталь 4 разожмется. Для зажимиого устройства (рис. 1П.27, а) сила зажима детали и осевая сила на штоке цилиндра: 1 -tg (g-ffinp) tg ?з q g(« + ?i np) tgУ2 jdjD) 1 -tg(a+?!np)tg<f3 трения на скобе tg(a+?inp)-f tg ?2(rfp) где tg9mp = tg9i((i/D); tg ф1 - коэффициент клина. На рис. П1.27, б дана схема клиноплунжерного усиливающего устройства с односкосым клином и двухопорным плунжером. При подаче сжатого воздуха в бесштоковую полость пневмоцилиндра поршень / со штоком 2 перемещается влево. Шток 2, поворачивая рычаг 3 па оси, перемещает прихват 5 на деталь и под головку плунжера 4, который одновременно, перемещаясь по скосу штока, опускается и головкой прижимает прихват 5 к детали 6 и закрепляет ее. Во время подачи сжатого воздуха в штоковую полость пневмоцилиндра поршень 1 со штоком 2 перемещается вправо и шток 2 скосом передвигает плунжер 4 вверх и, одновременно поворачивая рычаг 3, отводит влево прихват 5 от плунжера 4 и детали 6, и она разжимается. Пружина 7 на плунжере поднимает прихват 5 вверх для удобства снятия и установки деталей в приспособлении. Для клинорычажного устройства (см. рис. 1П.27, б) сила зажима и осевая сила: y/Q 1 - tg («-t-yi)-t-tg уз /, tg (a -f-?i) Ч- tg 2 j(a + ?0 + tg?2 1- tg(a + tg?3 где tg92 = [ -коэффициент трения в направляющей поверхности штока (клина); т) - коэффициент, учитывающий потери от трения. На рис. HI.28, а дана схема клиноплунжерного механизма-усилителя с односкосым клином на штоке пневмокамеры и консоль-" ным плунжером. При подаче сжатого воздуха в бесштоковую полость пневмокамеры мембрана / прогибается и перемещает диск со штоком 2 вверх; шток клиновым концом через плунжер 3 поворачивает рычаг 5 на оси 6 и верхнее плечо рычага 5 зажимает деталь 4. Во время подачи сжатого воздуха в штоковую полость пневмокамеры мембрана / прогибается вниз и перемещает диск со штоком 2 вниз, плунжер 3 освобождается от нажима клиновым концом штока, пружина 7 поворачивает рычаг 5 на оси 6 по часовой стрелке, и деталь 4 разжимается. Для данного устройства сила зажима детали: \X/-Q [1 - tg(«+?l)tgy3i,p J [tg(a4-<fi)4-tg92] h 0 1 2 3 4 5 6 7 8 9 [ 10 ] 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 |
||||||||