

|
|

|
Промышленный лизинг
Методички
Сила зажима детали и осевая сила на штоке (рис. 11.19, а): 2 Ltg(a + P) tgcp3 tg(a + p) - tg?3 Здесь L - длина рычага усилителя, мм; 15фзпр - приведенный коэффициент трения, учитывающий потери на трение в консольном (перекошенном) плунжере, tg<P3np=tgcp3 (3 а), где tgфз л: 0,1 - коэффициент трения скольжения в двухопорном (неперекошенном) плунжере; / - расстояние между осью шарнира и серединой направляющей плунжера, мм; а -длина направляющей плунжера, мм; аяйО,?. На рис. П1.19, б приведена схема зажимного устройства с пневмоприводом с двухрычажным шарнирным механизмом-усилителем двустороннего действия без плунжера. Прн подаче сжатого воздуха в штоковую полость пневмоцилиндра поршень / со штоком 2 перемещается вниз. В это время шток 2 опускает концы рычагов 5, шарнирно закрепленных на оси штока. Перемещаясь, рычаги 5 через рычаги 7 поворачивают прихваты 3 около осей 6, и прихваты короткими плечами зажимают детали 4. При подаче сжатого воздуха в бесштоковую полость пневмоцилиндра поршень 1 со штоком 2 перемещается вверх и концы рычагов 5, шарнирно закрепленных на оси штока 2, через рычаги 7 поворачивают прихваты 3 около осей 6 в направлении разжима деталей 4. Сила зажима детали и осевая сила на штоке цилиндра (рис. П1.19, б): .An; Q=2\F3.tg(a-fW-; 2fg(a-bl Q=2ritg(a + p). Здесь / и li-длины плеч прихвата, мм; L - длина рычагов усилителей, мм; т) = 0,9 -коэффициент, учитывающий трение в пневмо-цилиндре; Q - исходная сила на штоке пневмоцилиндра, Н(кгс); а -угол наклона рычагов усилителей, град; р -дополнительный угол к углу наклона а, учитывающий потери на трение скольжения в шарнирах, град. * Клиновые механизмы. В станочных приспособлениях применяют клиповые механизмы с односкосым клином без роликов, с роликами и многоклиновые самоцентрирующне механизмы. Механизмы с односкосым клином без роликов и с роликами применяют в качестве усилителей пневмо- и гидроприводов. Многоклиновые самоцентрирующие механизмы используют в конструкциях патронов, оправок и т. д. Клиновые механизмы-усилители. На рис. П1.20 показан клиновой механизм-усилитель с плоским односкосым клином 1, служа- щий для увеличения исходной силы Q привода приспособления. Шток .механизированного привода развивает исходную силу Q; перемещаясь, он нажимает на односкосый клип и создает вертикальную силу зажима W на наклонной поверхности аЬ. Силе зажима W противодействует нормальная сила реакции N на наклонной плоскости клина и силы трения Fi, F2, направленные в сторону, противоположную действию силы Q. Рассматривая клин при закреплении детали в приспособлении в состоянии равновесия, найдем соотношение между исходной силой Q и силой зажима W без учета трения в направляющих подвижного звена, перемещаемого наклонной плоскостью клина. Заменим силы N и Fi их равнодействующей Ri, разложим силу R) на составляющие силы W и Р. При условии равновесия клина с трением на двух поверхностях аЬ и cd клина находим, что две вертикальные силы зажима W взаимно уравновешиваются, а исходная сила Q на штоке цилиндра уравновешивается силами Р и Fz] следовательно. 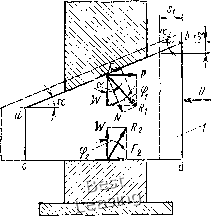 Из треугольника сил находим Рис. III.20. Клиновой механизм (зажим)-усилитель с плоским односкосым клином откуда Подставим найденны? значения Р и Fz в равенство для силы Qt Q=[tg(a-fcpi)-ftgcp2], W=Q/Itg(a+?i) + tgcpi.]. Для клинового механизма при условии трения только на наклонной плоскости клина 15ф2 = 0, тогда сила зажима =Q/tg (а+ cpi). Здесь а -угол наклона рабочей поверхности аЬ клина; ф!-угол трения скольжения на наклонной плоскости аЬ клина- ф2 -угол трения скольжения на горизонтальной плоскости cd клина-tgffi,= =/1 - коэффициент трения скольжения на наклонной плоскости клина; tgф2=/2 -коэффициент трения скольжения на горизонтальной плоскости клина. Отношение силы зажима Wk исходной силе Q на штоке привода является передаточным отношением сил: /e=r/Q=l,[tg(a+cpi) + tgcp2]. Перемещение $2 по вертикали точки приложения силы зажима W к перемещению sj по горизонтали точки приложения исходной силы Q называют передаточным отношением перемещений сил: 4=52/5i=tga; S2=sitga. Самоторможение клина при трении на двух его поверхностях определяется неравенством аф1 + фг. 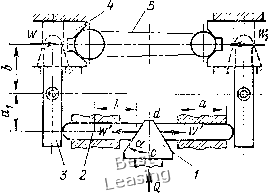
Рис. III.21. Схема комбинированного усилите-Рис. III.22. Многоклиновый цанго-ля из клиноплунжерного и рычажного меха- вый механизм (зажим) низмов-усилителей для зажима детали Приняв углы трения на рабочих поверхностях клина одинаковыми (ф1=ф2 = ф), получим неравенство а2ф. Для сопряженных стальных поверхностей клина и детали коэффициент трения скольжения / = lgф = 0,l, что соответствует углу трения ф = 5°43. В этом случае условие самоторможения клина при трении на двух его поверхностях будет прн угле наклона поверхности клина а1Г. На рис. П1.21 показан клиноплунжерный механизм-усилитель с двускосым клином 1, который через плунжеры 2, рычаги 3 и призмы 4 зажимает шатун 5. Клин / имеет равные углы наклона а и передает на плунжеры 2 одинаковые силы зажима W. Он представляет собой как бы два соединенных вместе односкосых клина. Поэтому все выводы, относящиеся к односкосому клину, действительны и для двускосого клина с небольшой поправкой на отсутствие силы трения р2 (так как ф2 = 0) на основании cd клина. Для клиноплунжерного механизма-усилителя сила зажима детали [Н(кгс)] Передаточные отношения сил: / l-tg(a+yi)tgy3„p Q tg(a-f-?i) Здесь Q - исходная сила на штоке механизированного привода, Н(кгс); гс! - передаточное отношение клиноплунжерного механизма-усилителя; tc2-передаточное отношение сил для плеч рычагов первого рода; IF -осевые силы плунжеров, Н(кгс); п = 2 -число плунжеров; щ и 6 -длины плеч рычагов первого рода, мм; а - длина направляющей втулки плунжера, мм; / - расстояние между точкой приложения силы W и серединой втулки, мм; В многоклиновых самоцентрирующих механизмах, например цанговых и клиновых патронах, клиновых оправках, все клинья зажимают детали с одинаковой силой. Каждый клин многоклиновых самоцектрирующих механизмов, перемещающийся по конической поверхности сопрягаемой детали приспособления, работает как односкосый клин с трением только по одной пли по двум рабочим поверхностям клина. На рис. П1.22 показан многоклиновый самоцентрирующий цанговый механизм (зажимное устройство) с упором / для прутка 2. В этом механизме каждый лепесток цанги (клика) при зажиме прутка 2, перемещаясь по неподвижной конической поверхности, работает как односкосый клин и преодолевает силы трения Fi яр2 по двум его рабочим поверхностям. Если в многоклиновом цанговом механизме упора 1 нет, то каждый лепесток 3 цанги прн зажиме прутка 2, перемещаясь по неподвижной наклонной поверхности аЬ, работает как односкосый клин и преодолевает только силу трения Fi по одной его рабочей поверхности (сила р2 = 0). Суммарная сила зажима детали всеми лепестками 3 цанги при трении только по наклонным поверхностям аЬ (рис. П1.22) McyM = Q;tg(a + cp,). Суммарная сила зажима детали всеми лепестками 3 цанги при трении по двум ее рабочим поверхностям Mc,M=Q/[tg(a + ?!) + tgcp2]. Сила зажима детали каждым лепестком цанги где п -число лепестков в цанговом механизме (зажиме). На рис. П1.23, а показана схема клинового механизма с односкосым клином 1 и двумя роликами: верхним 5, перемещающимся с плунжером 4 вверх при зажиме обрабатываемой детали, и нижним 2 - опорным. В этом клиновом механизме схема взаимодействия сил между клином / и роликами 2 я 3 такая же, как в клиновом механизме, представленном на рис. П1.20, но поскольку клин / передает силу зажима не плоским поверхностям, а вращающимся роликам 2 и 5, то в формулу для определения силы зажима W вместо коэффициента трения скольжения tg92 и угла трения скольжения ф1 подставляют приведенные коэффициент трения качения Фгпр и угол трения качения фщр. Для клинового механизма (рис. III.23, а) сила зажима Для клинового механизма с односкосым клином с одним роликом на наклонной плоскости клина (рис. 111.23, б) сила зажима 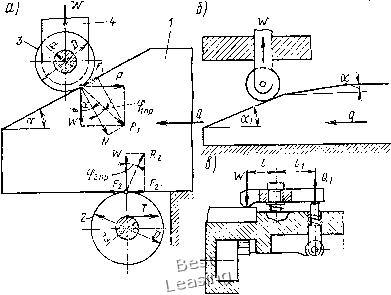 Рис III.23. Схемы для расчета клинового механизма с односкосым клином и двумя роликами (а, в) и с одним роликом (б) Для клинорычажного механизма (рис. 111.23, в) сила зажима и осевая сила на штоке: [tg(a+<Pinp)-(-tg?2np] Q= Qi [tg (a+cpi „p)-f tg(p2np] Значения приведенных коэффициентов и углов трения качения найдем при условии равновесия нижнего ролика (рис. III.23, а). Величина моментов от сил трения f2 и 7 относительно оси ролика F2(£»/2)=r(rf/2). Подставим ,в приведенное равенство значения F2=Wtg2up и r=rtgcp2, получим /tgcp2„p(D/2)=U/tgcp2(rf/2). Сокращая правую и левую части равенства на W и на 2, определим приведенный коэффициент трения качения для нижнего ролика: tgcp2„p=tgcp2(fl;/X>). Аналогичная формула применима и для определения коэффициента трения качения верхнего ролика: tg cpi „p=tgcpi (dlD). Приведенный угол трения качения tpi пр=arctg tg cpi [dlD] = arctg f, [djD). Следовательно, для уменьшения величины приведенного коэффициента трения качения и угла трения качения следует принимать диаметр d осн ролика минимально допустимым, а наружный диаметр ролика D - максимальрю допустимым конструкцией приспособления. В приведенных формулах: ф! - угол трения на наклонной плоскости клина; tgф!=/! = 0,l - коэффициент трения качения на направляющей рабочей поверхности клина; фшр - приведенный угол трения качения на наклонной плоскости клина; d - диаметр оси ролика, мм; ф2пр - приведенный угол трения качения на направляющей поверхности клина; D - наружный диаметр ролика, мм; tgcp2np - приведенный коэффициент трения качения. Примем коэффициент трения скольжения /=f!=/2 = tgф! = = tgф2 = 0,l; ф! = ф2 = 5°43 и отношение (i/D = 0,5; тогда приведенные коэффициенты трения качения: tgф!пp=tg ф! (d/D) =0,1 •0,5== = 0,05; tgф2пp=tgф2(d/D)=0,l•0,5. Условие самоторможения клинового механизма определяется коэффициентом трения скольжения / и отношением djD: при tgф!пp = 0,05; ф!пр= arctg tgф!(<i/Z)) = arctg/(d/D) или ф1пр= = arctg 0,05=2°52. При указанных значениях / и djD условие самоторможения для односкосых клиньев с двумя роликами обеспечивается, если угол наклона а5°40. Клиновые механизмы с роликами применяют как усилители механизированных приводов с углом а10°, они не самотормозящиеся. В таких клиновых механизмах потери на трение клина меньше, а сила зажима больше, чем в клиновых механизмах без роликов. Например, при одинаковой исходной силе Q на штоке механизированного привода для клинового механизма с углом а = 2° без роликов сила зажима W = 4,14 Q, для клинового механизма с двумя роликами (см. рис. П1.23) 1i = 8Q, а с одним верхним роликом IF = 5,4Q. 3-2684 65 0 1 2 3 4 5 6 7 8 [ 9 ] 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 |
||||||||||||||||||