

|
|

|
Промышленный лизинг
Методички
расчет роторных машин Вал, вращающийся в опорах, - один из самых ответственных узлов роторной машины. Ресурс машины, предупреждение аварий, производительность, точность технологических операций, совершаемых роторной машиной, зависят прежде всего от уровня колебаний ротора и давлений между ротором и опорами. Для повышения производительности и удовлетворения высоких требований к точности при создании новых роторных машин используют различные пути: а) увеличение мощности одного агрегата без изменения номинальной скорости вращения вала (например, в стационарном турбогенераторостроении), б) увеличение скоростей вращения ротора (например, газотурбинные транспортные двигатели, шлифовальные станки, турбонагнетатели, веретена, центрифуги). Одновременно стремятся уменьшить габариты роторной машины и снизить массу вращающихся вмов. Эти тенденции при конструировании роторных машин привели к проблеме борьбы с виброактивностью. Можно сказать без преувеличения, что низкая виброактивность роторной машины - свидетельство правильного расчета и конструирования. Если раньше при расчете машины можно было ограничиться определением критических скоростей вращения ротора и вести расчет при упрощающих предположениях об абсолютной жесткости опор, то в настоящее время такой подход не может привести к цели. Необходимо рассматривать динамическую систему ротор-податливые опоры-корпус машины-фундамент в целом. Специфические свойства смазочного слоя подшипников скольжения или особенности подшипников качения должны быть учтены при расчете. Влияние ряда малоизученных факторов, например двоякая жесткость роторов, овальность шипа в подшипнике скольжения, температурная асимметрия роторов машин, остаточная неуравновешенность и разбалансировка ротора в процессе эксплуатации, должно быть включено в расчет машины. В заводской практике известны случаи, когда опытные экземпляры роторных машин не могли выйти на номинальную скорость вращения, и попытки преодоления порога путем ужесточения допусков, подбора сортов смазки и т. п. не приводили к желаемым результатам. Причины следовало искать в неправильном конструировании и динамическом расчете машины. Из трех видов колебаний роторов - поперечных, крутильных и продольных - в данной книге рассматриваются только поперечные колебания. В роторных машинах именно эти колебания имеют решающее значение. В тех случаях, когда в динамической роторной системе действуют факторы, вызывающие периодическую не- ~ раниомсриость вращения (например, периодическое изменение muimiiii нагрузки), и возникают крутильные колебания, для их iicivuvioiiamni можно рекомендовать книгу В. П, Терских [99]. , 4 Следует отметить, что наряду с детерминированными характеристиками роторной машины (размеры, массовые, инерционные параметры, скорость вращения и т. п.) имеются факторы со случайными характеристиками (например, распределение неуравновешенности по длине и в радиальных плоскостях). Для расчета критических скоростей роторной машины, не зависящих практи-чески от случайных факторов, целесообразно применение современных ЭВМ. Остальная информация о виброактивности - амплитуды колебаний, давления между ротором и опорами, давления, передаваемые на фундамент, - существенно зависят от случайных факторов и во многих случаях достаточно приближенно оценить их значения исходя из упрощенных математических моделей. В этих случаях необходимо применить к расчету вероятностный подход. В литературе по расчетам роторных машин в основном уделяется внимание определению амплитуд колебаний роторов, тогда как наибольший практический интерес представляют динамические нагрузки между ротором и опорами, а также давления, передаваемые на фундамент машины. Хотя амплитуды колебаний и динамические нагрузки взаимосвязаны, их нельзя отождествлять. В связи с этим возникает проблема оптимального проектирования роторных машин. В зависимости от назначения машины и предъявляемых к ней требований могут быть сформулированы различные критерии качества. Так можно минимизировать давления между ротором и опорами, что увеличивает ресурс и одновременно уменьшает шум, излучаемый машиной. Можно критерием качества избрать минимальный вес, что особенно важно, например для авиационных газотурбинных двигателей, В других случаях существенным является высокая скорость вращения ротора, например в электрошпинделях высокооборотных шлифовальных станков. В некоторых случаях важным, является ресурс машины, в частности длительность межремонтных эксплуатационных периодов. Проблема оптимального проектирования роторных машин может быть более сложной в случае векторной оптимизации нескольких критериев одновременно. При создании крупногабаритных, трудоемких машин целесообразно на стадии проектирования и испытания пользоваться методом физического моделирования. Конструирование модели по законам подобия и ее испытание позволяют определить влияние различных факторов на виброактивность роторной машины, прежде чем перейти к изготовлению опытного полноразмерного образца машины. Опыт передовых машиностроительных заводов подтверждает полезность создания и испытания таких моделей, в особенности, когда проектируется машина, не имеющая близкого прототипа. 1 В дальнейшем не делается различия между ротором и вращаюшимся валом. в современных роторных машинах рабочая частота враш,ения располагается выше первой, а часто и выше второй критической скорости. В связи с этим при конструировании и расчете необходимо обеспечить переход через зоны критических скоростейс малыми резонансными амплитудами и виброперегрузками. Уровень вибрации зависит от следующих факторов: а) близость к критическим скоростям; б) распределение масс ротора; в) упругие характеристики системы; г) рассеяние энергии в системе; д) неуравновешенность ротора. Никакое внутреннее рассеяние энергии в самом роторе не связано с ограничением резонансных амплитуд, поскольку форма изгиба ротора при прецессии не меняется. Основным источником рассеяния энергии служат радиальные подшипники и гидродинамические уплотнения. Без этих источников демпфирования переход через критические скорости оказался бы сильно затрудненным. Однако ошибочным следует считать путь искусственного увеличения демпфирования для перехода через зоны критических скоростей. На рабочих скоростях увеличение демпфирования не сказывается на уменьшении амплитуд вибрации, но уменьшает к. п. д. машины. Нелинейные демпферы могут явиться причиной возникновения новых зон повышенных вибраций. Более прогрессивным является другой метод снижения амплитуд при переходе через критические скорости. Оставляя ротор без изменений, делают опоры упругими. Тем самым снижается жесткость системы и вместе с ней резонансные амплитуды. Если податливость опор значительно больше податливости ротора, то последний можно рассматривать как жесткий до подхода к третьей критической скорости. Такой подход к конструированию роторных машин позволяет создать машины, роторы которых проходят зоны первой и второй критических скоростей с малыми амплитудами и виброперегрузками, без изгибных колебаний. Рабочие скорости при этом располагаются выше второй критической скорости в зоне самоцентрирования [42, 43]. Использование упругих опор не получило до сих пор широкого распространения. Это объясняется отсутствием в распоряжении проектировщиков стандартных упругих подшипников различных типоразмеров. Упругие опоры в настоящее время изготовляются отдельно для каждой машины, тогда как изготовление их вместе с подшипниками качения или в виде упругих подшипников скольжения на специализированных заводах позволило бы быстро внелрить их в машиностроение. В некоторых случаях существенное значение имеют переходные режимы (пуск, останов и перемена режима вращения роторной машины), В частности, при источниках энергии ограниченной мощности могут возникнуть нежелательные явления, исследованные в работах [60, 21, 221 Целью книги является внедрение в конструирование роторных машин современных способов борьбы с виброактивностью, что позволит увеличить ресурс й создать работоспособные машины. ГЛАВА 1 ВИБРОАКТИВНОСТЬ РОТОРОВ МАШИН 1. Влияние, погрешноотей исходных данных на погрешнооть расчета критических сксрсстей Настоящая глава посвящена анализу причин, обусловливающих виброактивность роторов. Основное внимание при этом уделяется определению уровней вибронагрузок на опоры. Учитывая, что уровень вибронагрузок существенно зависит от точности расчета критических скоростей проектируемой роторной системы, первый параграф главы посвящен изучению влияния погрешностей исходных данных на величины расчетных критических скоростей. При выполнении расчетов некоторые исходные данные могут быть определены лишь приближенно. Прежде всего это относится к таким параметрам системы, как обобщенные массы и коэффициенты жесткости опорных конструкций, коэффициенты жесткости масляной пленки подшипников скольжения, моменты инерции роторов сложной конфигурации и т. д. Другие параметры, такие как жесткость вала, несущего насаженные с натягом детали, или полярный момент инерции гибких дисков, не являются постоянными, а изменяются под действием центробежных сил инерции [37, 107]. Отклонения-некоторых параметров от их расчетных значений также могут иметь место в процессе монтажа и эксплуатации машин. Погрешности исходных данных могут вызвать большое несоответствие между расчетными и действительными значениями критических скоростей роторов. На практике отмечен ряд случаев, когда по этой причине роторы оказывались работающими в зоне критических скоростей вращения [38, 66, 121], В связи с этим возникает задача определения границ возможных значений критических скоростей в зависимости от точности исходных данных. Вначале рассмотрим аналогичную задачу о собственных частотах линейной консервативной колебательной системы с п степенями свободы, дифференциальные уравнения движения которой около устойчивого положения равновесия имеют вид S {aijqj + cjqj) = 0 (t - 1, 2, . . ., n), /=1 (1.1) где Qj-обобщенные координаты; aij, cj-обобщенные. коэффициенты инерции и жесткости. Коэффициенты Сц, образуют две симметрические матрицы: матрицу жесткости С = Ц.Ц и , матрицу инерции А = Waj и являются функциями жесткостных Ks и инерционных параметров системы: (Jf) (г = 1, 2, m). J (1.2) Здесь и в дальнейшем под Ks понимаются значения коэффициентов жесткости упругих элементов системы в направлении координатных осей, а под 7-массы, осевые и центробежные моменты инерции элементов системы. Зависимости t. выражают пространственное расположение и ориентацию упругих элементов системы и являются линейными по отношению к параметрам /С/, функции яру также являются линейными по отношению к параметрам причем некоторые хз. них могут представляться тождествами. Собственные частоты ( = I, 2, . . ., п) системы находятся из уравнения частот: 12 23 Р %2 • • * (1.3) или в сокращенной форме записи О (i, / = 1, 2, «). (1.4) На основании теорем о влиянии масс и жесткостей на собственные частоты [8] можно сделать следующие качественные оценки: 1) увеличение любого из жесткостных параметров Ks приводит к увеличению функции Релея, поэтому частоты системы увеличиваются или по крайней мере не уменьшаются; 2) увеличение любого из инерционных параметров приводит к уменьшению функции Релея, поэтому частоты системы убывают или по крайней мере не возрастают. Пусть все жесткостные параметры /( (s = 1, 2, . . I) изменились на одинаковую относительную величину при неизменных параметрах J., т. е. стали равными KtKl(\+c). (1.5) Здесь и в дальнейшем К1, J ?, с?/, а?/, pk - исходные значения; Kt, J*ry Сц, alj, Pk - новые значения соответствующих величин. В силу линейности зависимостей (1.2) выражению (1.5) соответствует изменение всех коэффициентов жесткости также на одинаковую относительную величину т. е. c*i = с?/ (1 + Рс)- Уравнение частот (1.4) для измененной системы можно преобразовать следующим образом: Р< ?/(1+Рс) (1+р.)"-0, . (1.6) О находим, что все PkCI-i . /1+ Рс / откуда с учетом тождества -fkij собственные частоты изменились на одинаковую относительную величину аи стали равными р1 = Pfetl -ссс), (1.7) a,=KlTK-l. (1.8) Аналогичным образом получаем, что при изменении всех инерционных параметров Jj. на относительную величину Ра спектр собственных частот сместится на величину а, определяемую по формуле Графики зависимостей (1.8) и (1.9) приведены на рис. 1.1. При малых р и р имеем: Рс/2; а.-р./2.(1.10) 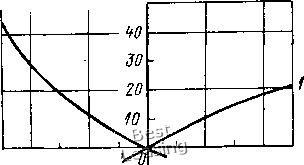 -50 -0 -30 -20 -\ •100 JO w А% Рис. 1.1. Графики изменения собственных частот вследствие изменения параметров системы: } - жесткостных параметров: - j/ 1 + - - 1 2 - инерционных параметров: - 1 На основании вышеприведенных качественных оценок можно показать, что при изменении какого-либо одного параметра или некоторой совокупности одноименных параметров системы на относительную величину Р изменение собственных частот не будет больше значения, определяемого по выражению (1.8) или (1.9). Если параметры Ks и изменились на относительные величины Рс и Рд, то, применив поочередно формулы (1.8) и (1.9), найдем, что собственные частоты в этом случае примут значения (1.11) р,1Л(1 + р.)/(1+р.). Пусть ±Pt и ±Ра - наибольшие погрешности параметров /С. и т. е. имеют место неравенства: К! (1 - Рс) < < Kt (1 + Рс); Л* (1 - ра) < л < л*(I + ра), где Ksj Jf -действительные значения; ТС*, J* чения параметров. расчетные зна- [ 0 ] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |