

|
|

|
Промышленный лизинг
Методички
Математическое ожидание и среднее квадратическое отклонение модуля суммарного вектора равны: 7И[2]0,42/?*к; a[Z]0,22i?c*K; R*ck 3 V + 0,5V\ (3.15) Очевидно, что точность формул (3.13)-(3.15) уменьшается с возрастанием отношения V/Ox- Если вектор W, в свою очередь, является суммой векторов R, то в формулах (3.15) вместо Ох нужно подставить величину 1/3/?ск. определяемую выражением (3.9). Снижение уровня динамических нагрузок на опоры может быть достигнуто двумя путями: 1) уменьшением числовых характеристик случайных факторов что соответствует повышению класса технологической точности; 2) при тех же q*, но направленным изменением функциональной зависимости между и qi, что соответствует изменению упруго-инерционных характеристик роторной системы. В том и другом случае для оценки эффективности мероприятий по снижению уровня нагрузок на опоры необходимо: 1) выявить все факторы вызывающие нагрузки R( одной частоты; 2) установить функциональные зависимости между qi и Ri до и после внедрения мероприятий; 3) назначить верхние границы поля допусков q* и вычислить соответствующие им нагрузки R* до и после внедрения мероприятий; 4) произвести суммирование случайных векторов на каждой частоте и определить их числовые характеристики; 5) вычислить снижение уровня нагрузок на каждой частоте как отношение математических ожиданий суммарных нагрузок до и после ьнедрения мероприятий. Приведенная методика позволяет производить приближенную теоретическую оценку эффективности внедрения того или иного мероприятия. Теперь рассмотрим некоторые вопросы, связанные с обработкой экспериментального статистического материала. Предположим, что имеются результаты измерений уровней динамических нагрузок на опоры п роторных машин. Обработку статистического материала целесообразно проводить применительно к решению следующих двух основных задач: а) проверки правдоподобности имеющихся теоретических результатов; 6) нахождения оценок и доверительных интервалов числовых характеристик ожидаемых динамических нагрузок. Для решения первой задачи можно воспользоваться методом А. Н. Колмогорова [25]. Суть его заключается в следующем. Строятся статистическая Ф (R) и предполагаемая теоретическая F (R) функции распределения нагрузок на каждой частоте, Находится D - максимум модуля разности между функциями. Далее определяется величина X = D Уп и по таблице (приложение 1) находится Р (Х) - вероятность того, что за счет чисто случайных причин максимальное расхождение Ф (/?) и F (R) будет не меньше, чем фактически наблюденное. Если вероятность Р (Х) велика (более 0,1), то гипотеза о совпадении теоретического закона распределения F (R) с опытным Ф (R) не опровергается, если же Р {X) мала, то расхождение между ними следует признать не случайным и гипотезу отвергнуть. Вторая задача вызвана тем, что при небольшом числе испытаний экспериментальный материал содержит значительный элемент случайности, поэтому случайными оказываются и все числовые характеристики, вычисленные на основе этих данных. В таких условиях может быть поставлена задача лишь об определении оценок и доверительных интервалов искомых числовых характеристик [25 ]. Оценка математического ожидания определяется равенством (3.16) Предполагая, что имеет место закон распределения Релея, оценка кругового рассеивания находится по формуле 0,8. (3.17) 1,253 Доверительный интервал кругового рассеивания является несимметричным и определяется формулой (3.18) где р - доверительная вероятность, т.е. вероятность того, что интервал со случайными концами (Yiffo, 720) накроет неизвестную величину Oq\ 7i, -коэффициенты, определяемые по таблице (приложение 2). Доверительный интервал математического ожидания определяется выражением PJYiM W]<V2} = р. (ЗЛ9) Используя правило трех сигм, заключаем, что с вероятностью р все практически возможные значения, которые сможет принимать R, находятся в пределах 0<i? ЗузОо. (3.20) Если результаты измерений нагрузок получены в децибеллах, то для статистической обработки их нужно перевести ь килограммы, так как величина L = Ig R имеет распределение, отличающееся от распределения Релея. Пример 3,1. Применим вышеизложенную методику к вероятностной оценке уровней динамических нагрузок на опору 2 ротора турбогенератора общепромышленного применения, изображенного на рис. 3.2. Исходные данные: п = 3000 об/мин; = 2500 кгс; Gj = 1800 кгс; rfj = = с2 = 22 см; Dl = 52 см; Wi = 393 с"; роторы соединены жесткой муфтой и Генвратор Турбина V7. 7 2000 Рис. 3.2. Расчетная схема ротора турбогенератора опираются на подшипники скольжения с х = 0,6; ротор генератора имеет анизотропию жесткости с коэффициентом а 2,1%; обмотки ротора генератора имеют водяное охлаждение и, вследствие неодинаковости поперечных сечений каналов, температурное возмущение паза может составлять 1,5° С. Кроме того, имеются результаты измерений уровней вибронагрузок на данную опору десяти серийных турбогенераторов (табл. 3.1). Таблица 3.1. Результаты измерений вибронагрузок на вторую опору турбогенератора
Требуется; а) определить теоретически ожидаемый уровень динамических нагрузок как для имеющегося класса технологической точности, так и для случая предъявления повышенных требований по уровню нагрузок на опоры; б) произвести обработку экспериментального материала с целью проверки правдоподобности теоретических результатов; в) найти оценки и доверительные интервалы экспериментальных числовых характеристик. В табл. 3.2 приведены: а) основные факторы qi определяющие уровень нагрузок на опоры данного типа роторной машины; б) предельные максимальные значения факторов для обоих видов исполнения машины; в) предельные максимальные нагрузки ji* на опору 2, соответствующие факторам q* и вычисленные на основе выявленных в гл. 1 функциональных зависимостей. Динамическая нагрузка /?* делялась по формуле k 6*0)2, (3.21) on ре- 2 1-1 коэффициент динамичности системы, равный 2,8 где I - (-.\ при .(o/cui = 0,8. Величины /?д и находились по формулам, аналогичным (3.21). Остальные величины R* определялись по аналогии с примерами, разобранными в соответствующих разделах гл. h 108ч Таблица 3.2. ВибронагруЗки на вторую опору турбогенератора, вызванные различными факторами
Модули всех векторов Ri, имеющих частоту 50 Гц. подчиняются закону распределения Релея и их сложение производится по формулам (3.8)-(3.9). Сложение векторов, имеющих частоту 100 Гц, производится по формулам (3.15). Результаты сложения векторов представлены в табл. 3.3. Таким образом, среднеожидаемые нагрузки на опору 2 у машин, изготовленных с повышенными требованиями, составляют 76 кгс на частоте 50 Гц и 34кгс на частоте 100 Гц. Учитывая, что статическая нагрузка на опору составляет 1250 кгс, соответствующие относительные величины равны 6,1 и 2,7%. Максимальные ожидаемые относительные величины при этом составляют Г4,5 и 6,5% соответственно. Эффективность повышения требований к точности изготовления, балансировки и монтажа роторов вычисляется как отношение соответствующих математических ожиданий и составляет 2,2 раза на частоте 50 Гц и 2,1 раза иа частоте 100 Гц. Таблица 3.3. Результаты сложения случайных векторов вибронагрузок иа вторую опору турбогенератора
Если принйть за допустимый уровень максимальных относительных нагрузок 2% для частоты 50 Гц и 1% для частоты 100 Гц, то, как видно из результатов расчетов, достигнутый уровень после повышения технологической точности превышает требуемый в б-7 раз. Сравнение экспериментальных (табл. 3.1) и теоретических (табл. 3.3) результатов произведем по методу А. Н. Колмогорова. На рис. 3.3 построены статистическая Ф {К) и теоретическая {Щ функции распределения нагрузок, имеющих частоту 50 Гц. Функция F {R) определяется формулой (3.2) при значении Oq = 133 кгс. Как видно из рисунка-, D = 0,16. Определив величину К ~ D Vn = = 0,16 VTO = 0,505, по таблице (приложение 1) находим Р (Х)=0,96. Для частоты 100 Гц аналогичным образом находим D = 0,24; Х = 0,76; Р{Х) = 0,61. Так как Р {К) для обеих частот достаточно велика, то можно считать, что гипотеза о согласии опытных данных с теоретическими не опровергается. Оценки математического ожидания и кругового рассеивания на частоте 50 Гц, вычисленные с помощью табл. 3.1 и формул (3.16)-(3.17), равны R = 162 кс; = 130 кгс. U8 Q6\ 0.4 0,2 О
500 Rh8C Рис. 3.3. Экспериментальная Ф (R) и теоретическая F (R) функции распределения нагрузок на опору 2 на частоте 50 Гц Коэффициенты 7i и входящие в формулы (3.18)-(3.19) и определяемые по таблице (при- ложение 2), п вероятности Таблица 3.4. Результаты вычислений оценок и доверительных интервалов числовых характеристик вибронагрузок на вторую опору турбогенератора
[ри доверительной э - 0,95 составляют Yi = 0,688; 72 = 1.S26. Истинные значения кругового рассеивания и математического ожидания находятся в пределах: 9000 238; 112М[/?] 297. Границу практически "возможных значений R находим по формуле (3.20) тах = Зуао "0 кгс. Аналогичные вычисления производим для нагрузок на частоте 100 Гц. Результаты вычислений приведены в табл. 3.4. 2. Влияние податливости опор на уровни вибронагрузоКу вызванных анизотропией жесткости ротора, овальностью цапф и неооосностью роторов Анизотропия жесткости ротора. В качестве теоретической модели рассматривается ротор с одним диском массой т, закрепленным посередине невесомого горизонтального вала НО с жесткостями и Вал опирается на упругие невесомые подшипники, имеющие изотропную жесткость с коэффициентом Cq (рис. 3.4). Так же как и в п. 2 гл. 1, движение системы рассматривается во вращающихся координатах 1ц. Пусть I и tj - координаты центра диска; Ь и т] о - координаты центров подшипников; ц е - эксцентриситеты центра масс диска в направлении осей I и г) соответственно.  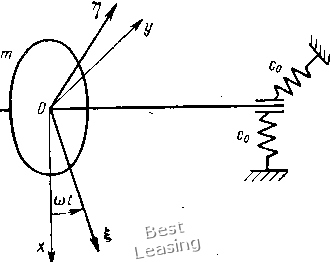 Рис. 3.4. Схема ротора двоякой жесткости на упругих опорах Дифференциальные уравнения движения системы выводятся аналогично уравнениям (1.33) и имеют следующий вид: - 1о) = tneiio + mg cos о/; . го) = /712(0 - mg sin (ot; - U) = 0; m (I m (ц 2a)Ti 2o)H - 0)2?) t cori) Cxil C2 (л 2Coio 1 il ОЦО - C2 in (3.22) Исключив из уравнений (3.22) величины lo и л о, получим: т (I т (г 2(оц 2о)Н те-,(д С02Ч = /ПзО) mg cos со ; 1 mg sin (ot. 2cqCi 2CqC2 2co + Ci Окончательно получим: %-2(оц + (0)01 - to) I Г + 2o) + (со§2 - () Л 2Cq -\- Cg (3.23) eico 02(0- g COS (Ot\ g sin co (3.24) COoi m (2cq + Cx) 1+1/20 т(2со + Сз) I + C2/2C0 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 [ 17 ] 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||