

|
|

|
Промышленный лизинг
Методички
уравнения (3.24) имеют точно такой же вид, что и уравнения (1.18),- полученные для случая абсолютно жестких опор. Разница состоит лишь в критических скоростях o)i и 0)2. Поэтому для динамических нагрузок, по аналогии с (1.31), можно сразу записать «о» (3.25) an = 02 - 01 02 +91 0)02 Р 1/ 1 + 2/20. (3.26) Здесь и в дальнейшем индекс «О» означает принадлежность к системе с упругими опорами. Нагрузку Ro можно также найти с помощью графика на рис. 1.7. Для этого достаточно лишь параметры» и 0)2 заменить наао и 0)03. Для приближенной оценки влияния податливости опор на нагрузки на опоры предположим, что жесткость опор Cq меньше жесткости вала С2 в k раз, т. е. cJcq = k. Учитывая, что на закритических скоростях вращения R а и i?o «о, из формул (3.26) получим RlRo а/ао (1 + й/2). (3.27) Пример 3.2. Требуется вычислить динамические нагрузки на опоры ротора генератора, рассмотренного в примере 1.1, если его подшипники установлены в упругие опоры с коэффициентом жесткости = 17 ООО кгс/см. В случае жестких опор (из примера 1.1) имеем: = 17,4*10* кгс/см; 16,7-10* кгс/см; а= 0,021; р = 0,8; R = 1,64 а = 0,0345, или 3,45%. Учитывая, что k= cJcq 10, с помощью приведенных выше формул находим: / Po = PKl +0,5Ai= 1,96; ао I + 0,5/г = 0,0035; Ro = 1-4Ро «0 = 0,0037, или 0.370/0; R/Ro = 9,S. Таким образом, за счет податливости опор нагрузки уменьшились в 9,8 раза. Формула (3.27) в данном случае- дает заниженную величину, так как ротор на жестких опорах работает в докритической зоне частот (Р - 0,8). Овальность цапф. Рассмотрим жесткий ротор массой 2т, опирающийся на подшипники скольжения. Цапфы ротора имеют одинаково ориентированные овальности профиля Dax-D Подшипники соединяются с фундаментом через упругое изотропное поле с коэффициентом жесткости Cq. Для приближенной оценки влияния податливости опоры на уровень вибронагрузок ограничимся рассмотрением колебаний системы в одной плоскости. При этом сделаем следующие предположения: масляная пленка подшипников обладает изотропной жесткостью с; демпфированием пленки и JvIaccoй подшипников пренебрегаем; между овальной цапфой и подшипником действует возмущающая сила Р (t) = Р sin 2(ot. Величина Р находится по методике, изложенной в гл. 1. Расчетная схема системы показана на рис. 3.5. Пусть X - координата центра цапфы; Xq - координата центра подшипника. Тогда дифференциальные уравнения движения системы имеют следующий вид: тх -\- {х - е{х~ Хо) Исключая лго и преобразуя, получим xA-cdlikx = k- sin2o)/, Xq) = P sin 2(dt; OqXq = -P sin 2(dt. (3.28) P(t)k (3.29) Р(й XiKo Pit) где обозначено: cjm\ /77777 Co /77777 Pit] k = Co/(Cq + Cm). (3.30) Рис. 3.5. Динамическая модель упругого подшипника скольжения, несущего овальную цапфу Частное решение уравнения (3.29) имеет вид: Sin2o)/. Динамическая нагрузка на подшипник АкыР 0 - 0-0 -: 40)2 sin 2о)/. (3.31) Учитывая распространенную в литературе [100] приближенную формулу Я/6, (3.32) для коэффициента жесткости масляной пленки можно записать следующее выражение: crng/b. (3.33), Здесь 6 - радиальный зазор подшипника. Из формул (3.30)-(3.33) получим выражение для модуля динамической нагрузки следующего вида: 40)26 8 А, с. Кельзоп II (3.34) Из последней формулы следует, что в случае жестких опор (0 - со, yfe - 1) при 0) 0,5wm модуль R оо. Однако известно, что вследствие сильных демпфирующих свойств масляной пленки, на графике вынужденных колебаний жесткого ротора на собственной частоте со резонансный пик практически отсутствует. Коэффициент передачи при этом равен единице в широком диапазоне частот н R Р, С уменьшением жесткости опор Cq уменьшается параметр k; собственная частота системы, равная со, также снижается. 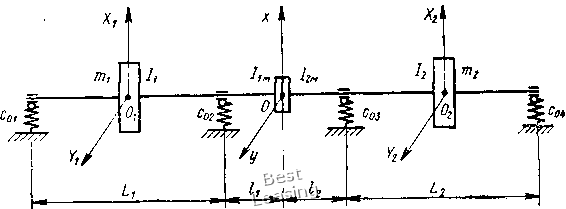 Рис. 3.6. Схема несоосных роторов, установленных в упругие опоры При малых значениях k демпфирующие свойства масляной пленки проявляются только на резонансной частоте, поэтому точность формулы (3.34) возрастает. Уменьшение нагрузки Rq на зарезонансных частотах определяется по формуле 40)26 40)26 (3.35) Пример 3.3. Требуется определить снижение уровня вибронагрузок на подшипник, рассмотренный в примере 1.2 (вариант 1), после установки его в упругие опоры с коэффициентом жесткости Cq = 1,5*10* кгс/см. Система имеет следующие исходные данные: б - 7,5 • 10" см; Dmax - Dm\n ~ = 0,001 см; 0=314 с; относительная нагрузка на подшипник Р= 12%. Пусть вес ротора G= 22 кгс. Тогда 2т = 2,3 кгс-с2/см. Подставив исходные величины в (3.35), находим Р Р г Л О, 7. Таким образом, уровень вибронагрузок на подшипники после установки их в упругие опоры снизился в 10,7 раза и стал составлять 1,1% от статической нагрузки. Несоосность роторов. Предположим, что соединяемые роторы установлены в упругие опоры с коэффициентами жесткости Со/ (или с коэффициентами податливости бо/= l/iCoy), где/ = 1, 2, 3,4- номер опоры (рис. 3.6). Очевидно, что все выражения, полученные в н. 4 гл. 1 при исследовании динамики несоосных роторов на жестких опорах, переносятся без изменений и на случай податливых опор. Исключение составляют лишь коэффициенты, связывающие деформации и нагрузки, т. е. коэффициенты податливости системы а, й/, gi h, цу 7ш> где i = 1,2 - номер вала. Учет податливостей опор может быть произведен путем прибавления соответствующих слагаемых к значениям перечисленных коэффициентов, полученных для случая жестких опор. Покажем это на примере коэффициента «х, связывающего п формуле (1.90) перемещение концевого сечения первого вала Vi с приложенной в том же сечении силой Р, т. e.t/i = 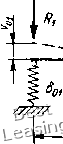  <3i Рис. 3.7. К определению увеличения коэффициента податливости за счет податливости опор Обозначим через Аа увеличение коэффициента (ii за счет податливостей опор бо1 и 6о2- Тогда Ai численно будет равна перемещению концевого сечения абсолютно жесткого вала после приложе-гшя в том же сечении единичной силы (рис. 3.7). Вычислив реакции опор: R = /i/Zi, R = I ~{~ IJLi и учитывая, что Vqx = 6oii?i, = бо2?2. получим a, = 6о1 (Zx/Li)2 + So2 [1 + {1г/и)Г. (3.36) Изменения остальных коэффициентов за счет податливостей опор находятся по аналогичной методике и определяются следующими выражениями: Аа<у. = боз ( 1 А&1 = Ai = S, «1 L\ LI б 04 а A/ii = (бо1 + 602) A/I2 = (боз + 604) Аби-А622 = Абг„ = (6о1 (боз 604); 2-О02 (3.37) I g h 2 и Аугм = (боз -Soi) Увеличение коэффициентов податливости системы в данном случае, так же как и в случае применения гибкой муфты, приводит к снижению нагрузок Р, М и динамических реакций опор. Следует отметить, что возможны также одновременное применение упругих опор и гибкой муфты, а также другие сочетания. Однако одним из преимуществ сочетания упругие опоры - жесткая муфта по сравнению с сочетанием жесткие опоры - гибкая муфта является то, что деформации опорных конструкций практически не вызывают появления несоосностей роторов. Пример ЗА. Требуется определить динамические нагрузки на опору 2 агрегата, рассмотренного в примере 1.3, после установки роторов в упругие опоры с одинаковым коэффициентом жесткости Cq - 14 ООО кгс/см (коэффициент податливости бо = \/cq = 71,5-10" см/кгс). Валы соединены жесткой муфтой с радиальной несоосностью р; угловая скорость 314 рад/с. В соответствие с формулами (3.36)-(3.37) находим: Аа = 91,5-10" см/кгс; = Аз- 45-10-8 кгс-1; Аа = А&1 A/ii A/ia = 3,6-10" 1/кгс-см; A6ii= Аб22 = 35,7-10-6 см/кгс; Л1м ~ А2м = 45-10" см/кгс; Душ = У2м = О- Прибавляя полученные величины к соответствующим коэффициентам в примере 1.3 и подставляя их в систему уравнений (1.109), получаем: (10« - 64о)2) Zl + 47,7Р + ОЛШ = 0; (106 - 640)2) 22 - 47,7Р+ 0,1 Ш = 0; -16,5o)2Zi - 16,5co2Z2 + 2,ЗМ = 0; -72co22i+ 720)222+ 188Р = -pW. Из полученной системы уравнений при о) = 314 с- находим: Р= 16,3-Юр; М - 0; 2i = 0,147р; Z = -2i. Подставив найденные величины в формулы (1.111), получим Щ = 2,8-10*р. Поскольку в случае жестких опор RP - 10- 10*р, динамические нагрузки на опору уменьшились примерно в 4 раза. 3. Динамика жесткого вала, вращающегося в одной шарнирной и второй упругой опорах Конструирование и расчет роторов прошли ряд этапов., До второй половины XIX в. роторы вращались, как правило, со скоростями, значительно меньшими первой критической скорости. Реакции опор были при этом близки к статическим реакциям. Расчет на прочность производился в связи с этим без учета динамики вала, т. е. вал рассматривался как балка, покоящаяся на неподвижных опорах с учетом характера заделки опоры. С ростом скоростей вращения, уменьшением габаритов машин и со снижением их массы вращающиеся валы стали эксплуатироваться при скоростях, близких к первой критической скорости, и вскоре возникла проблема перехода через зону критической скорости. Резкое увеличение амплитуд колебаний и давлений между вращающимся валом и опорами при приближении частоты вращения к первой критической препятствовало нормальной эксплуатации роторных машин. Шведский инженер Лаваль, столкнувшийся с этими проблемами при создании паровой турбины, рабочая частота вращения которой равнялась 30 ООО об/мин, впервые в 1884 г. создал конструкцию вала, которая позволила перейти через зону первой критической скорости. Испытывая различные варианты конструкций турбины, Лаваль экспериментально обнаружил парадоксальное явление. Увеличение толщины вращающегося вала практически не уменьшало уровня вибрации. Турбина при этом не могла выйти на рабочие скорости 30 ООО об/мин из-за недопустимого уровня амплитуды колебаний. Уменьшив значительно толщину вала, он насадил колесо турбины на тонкий, гибкий вал в палец толщиной. При разгоне, набирая скорость, турбина Лаваля легко переходила через критические скорости и на рабочей скорости вращалась практически без вибраций. Явление самоцентрирования, открытое Лавалем, нашло теоретическое объяснение в работах немецкого ученого Феппля [120] в 1895-1896 гг. Советский ученый-механик Николаи [73] распространил теорию Феппля на более общий случай неуравновешенного диска, насаженного асимметрично на безмассовый упругий вал. В работах Николаи учитывался гироскопический эффект, так как ось вращения диска меняет свое направление в пространстве в процессе движения. В этих работах было установлено свойство гибкого вала с насаженным на него Диском - самоцентрироваться после перехода через одну или две критические скорости. I Статически и динамически неуравновешенный диск на гибком вале при неограниченном возрастании частоты вращения совмещает главную центральную ось инерции с геометрической осью вращения - это явление и называется самоцентрированием. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 [ 18 ] 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |