

|
|

|
Промышленный лизинг
Методички
представлены на рис. 3.11. В подавляющем большинстве роторных машин В + Mli > Л и, следовательно, амплитудно-частотная кривая имеет вид, представленный на рис. 3.11, а. При дальнейшем увеличении частоты вращения вала начнет сказываться упругость вала и второй критической скорости (для случая, представленного на рис, 3.11, а) будет соответствовать форма колебаний изогнутого вала. При большой жесткости вала на изгиб амплитуды резонансных колебаний будут велики, так же как и виброускорения, поэтому зона рабочих скоростей машин, у которых жесткий вал вращается в упругой и шарнирной опорах. 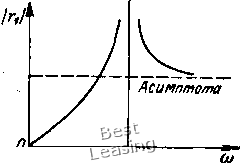 Асимптота В*тЦ<А Рис. 3.11. Амплитудно-частотные характеристики вынужденных колебаний вала, вращающегося в шарнирной н упругой опорах: а - В Л-М.1\>> А\ б-\б + + Ml\<i А ограничена, она должна располагаться ниже второй критической скорости. Переходим к определению динамических составляющих реакций опор. Составим для этого дифференциальные уравнения движения упругой опоры, отбросив мысленно вал и заменив его действие искомой реакцией Т: ту ~ -су + R сг (3.52) Здесь т - масса той части опоры (подшипника), которая не вращается вместе с валом, но колеблется вместе с ним. Внеся в уравнения (3.52) найденные ранее значения координат Уу г (3.49) и их производные, после простых преобразований найдем Rx = (с-mo)2) л (3.53) Из этой формулы следует, что реакция упругой опоры или, точнее, ее динамическая составляющая обращается в нуль при наличии статической и динамической неуравновешенностей вала, если масса удовлетворяет равенству т = с/о)2. (3.54) Таким образом, если рабочая скорость вала известна, а коэффициент жесткости опоры выбран (он выбирается чаще всего из соображений оптимального расположения критической скорости 124 вала), то можно выбором массы невращающихся частей опоры обратить в нуль динамическую составляющую реакции. Если у вала имеется некоторый заданный диапазон рабочих скоростей, то, подбирая массу опоры согласно (3.54) для некоторой средней рабочей скорости, можно значительно уменьшить реакцию опоры по сравнению с ее величиной, соответствующей лесткому креплению опоры. На рис. ЗЛ2 приведен пример конкретного сравнительного расчета реакций для упругого и жесткого креплений опоры в корпусе. Следует отметить, что удовлетворить равенству (3.54) не всегда возможно по условиям конструирования и прочности. И в этих случаях применение упругих опор приводит к значительному уменьшению реакций. Для определения динамической составляющей реакции шарнирной опоры освободим мысленно вал от шарнирной опоры, заменив ее действие искомой реакцией i?2- Запишем теорему о движении центра инерции вала в проекциях на неподвижные декартовы оси:
20 W ВОп-Юоб/тн cy + R c2 + /?2z- (3.55) Рис. 3.1,2. Зависимость давления между жестким валом и подшипником от частоты вращения (рабочая частота вращения 60 ООО об/мин): / - при жестких опорах; 2 - при упругих опорах • • • Подставив в эти уравнения найденные значения Ус, Zc, у, z, согласно (3.44) и (3.49) находим модуль реакции шарнирной опоры М- гМсое ( с - Мо) г cos а, (3.56) При увеличении угловой скорости вала реакция шарнирной опоры неограниченно возрастает. В работе [87] проведено сравнительное исследование давлений на опоры: а) при установке жесткого ротора в упругую и шарнирную опоры, б) при установке податливого ротора в двух жестких опорах. В результате этого исследования следует рекомендовать установку ротора в упругую и шарнирную опору при консольном расположении центра инерции вращающейся системы. В этом случае динамические давления на упругую и шарнирную опоры существенно снижаются. Если же центр инерции располагается между опорами, то снижения давлений можно добиться только при полном отсутствии динамической неуравновешенности, что на практике недостижимо. - Из двух опор наиболее нагруженной, как правило, является шарнирная, которая воспринимает основные усилия, вызванные динамической неуравновешенностью. Поэтому для таких роторных машин особо тщательно следует проводить динамическую балансировку. Для уменьшения давлений на опоры и снижения амплитуды колебаний рабочие скорости роторов с одной упругой и второй шарнирной опорами следует располагать так, чтобы они превышали первую критическую т J скорость более чем в три раза, но не доходили до второй критической скорости, связанной с изгибом вала. Влияние различных факторов на динамику вала, вращающегося в шарнирной и упругой опорах. Однопролетные роторные системы, . имеющие упругую и шарнирную опоры, широко применяются во многих областях машино* строения. Центрифуги и веретена в текстильном машиностроении, сепараторы в химическом машиностроении, центрифуги стиральных машин и многие другие роторные машины конструируются часто по этой схеме, поэтому дополним анализ, проведенный выше, исследованием влияния ряда факторов на динамику вала. Это позволит дать ответ на ряд вопросов, которые возникают у конструкторов таких роторных машин. Дифференциальные уравнения движения (3.48) дополним членами, учитывающими влияние вязкого трения [51], рис. 3.13: 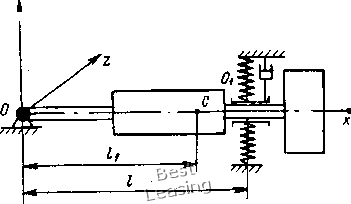 Рис. 3.13. Схема жесткого вала, вращающегося в шарнирной и упругой опорах, с учетом вязкого трения (3.57) BqZ - Ащ -f /az. + clH = MeinHJ sin Ы + (5 - A) sin (©/ - 8); By + Ло)2 + /г/ -f cly = MedilJ cos (dt + (S -4)/o)26cos (o)/-s), где для краткости обозначено Во = В ~\- Mlf. Введем комплексную, подстановку е = г + ir/. (3.58) Обозначим: 2n = alVBo\ k=-clVBo; d = A/Bo; = MelJ/B\ (3.59) fta = (В - А)Ы/В Тогда, умножая второе уравнение на t и складывая с первым уравнением системы (3.57), находим • • В - d (x>Qi + 2nQ + kQ = /igco ехр ш/, hi -j- /I2 ехр (-ei). (3.60) (3.61) Вынужденные колебания описываются частным решением этого уравнения, имеющим вид 9 - а ехр i(dt где комплексная амплитуда колебаний точки оси вала, лежащей в плоскости упругой опоры, равна /о м 0) {\ - d) + 2пт W*"/ Перейдем к относительным величинам: Y = (o/k; V = nlk; % = a/Zig. (3.63) В этих обозначениях относительная амплитуда вынужденных колебаний .(3.64)
Рис. 3.14. Амплитудно-частотные характеристики в зависимости от различных величин v Резонанс в системе (критическая угловая скорость) наступает при обращении в нуль знаменателя в (3.64). При пренебрежимо малом вязком трении критическая угловая скорость определяется соотношением = is,Jk = Vl/{1 - d) 1 + 0,5d, (3.65) поскольку d, учитывающий гироскопический эффект, для подавляющего большинства роторов мал. На рис. 3.14 представлены амплитудно-частотные характеристики, построенные по формуле (3.64). Резонанс в этих характеристиках смещен в сторону большей угловой скорости по сравнению с амплитудно-частотными кривыми, построенными без учета действия гироскопических сил. Комплексная координата центра инерции 9 = (ali/l + е) ехр ш/. Подставив значение а из (3.62), получим ti/l (0)23) )fe2 (2 (\ - d) + 2п(й1 ехр mt. (3.66) (3.67) 127 Отсюда радиус вращения центра инерции у2/(о2-(1 - d) +2/7/(0 И при неограниченном возрастании угловой скорости ротора предельное значение радиуса вращения центра инерции будет iklt) hs lim л ©->-оо (3.68) Рассмотрим частные случаи. 1. Ротор имеет только статическую неуравновешенность.. Тогда согласно (3.67) находим (-lill)Melxl В -А 0)->-оо. Bo(l-rf) Вс-.А (3.69) Отсюда следует, что при наличии только статической неуравновешенности самоцентрирование ротора может иметь место лишь при В = Л. Во всех других случаях центр инерции при неограниченном возрастании скорости вращения окажется не на оси вращения ротора, а на расстоянии в (В - A)I{Bq - Л) раз меньшем эксцентриситета. Из (3.69) видно также, что центр инерции ротора в зависимости от абсолютных величин В и Л при неограниченном возрастании частоты вращения лежит на прямой, проходящей через ось вращения в покое и ось вращения в движении. Центр инерции лежит дальше оси вращения в движении при В > Л, что имеет место в большинстве роторных машин, или между осями в покое и в движении в случае В < Л. Это следует из (3.69). Если ротор вытянут вдоль оси и В > Л, то совпадает по знаку с эксцентриситетом е. Если же ротор развит в радиальном направлении и В < Л, то г, будет иметь знак, противоположный е. 2. Ротор имеет только динамическую неуравновешенность. При неограниченном возрастании "угловой скорости радиус вращения центра инерции ротора (т. е. амплитуда его колебаний) Wxnr.bk. (3.70) С0->оо При неограниченном росте частоты вращения амплитуда колебаний точки, лежащей на оси ротора в сечении упругой опоры. Стремится к предельному значению lim а = hj{\ - d) (3.71) 0)00 И не зависит от вязкого трения в демпфере упругой опоры и жесткости рпоры. 128 Расчеты показывают, что при прохождении первой резонансной зоны давления ротора на опоры являются небольшими по сравнению с давлениями на шарнирную опору при рабочих режимах, выбранных вдали от этой зоны. Основным затруднением при прохождении зоны резонанса являются большие амплитуды колебаний ротора. Из (3.59) и (3.61) при первой критической скорости амплитуда колебаний упругой опоры - Melt + (B~A)S ехр (- 1г) \Гс 2ло) VBi,~A Отсюда следует, что вибрации при прохождении зоны первой критической скорости будут уменьшаться не только при увеличении вязкого трения (а), но и при уменьшении жесткости упругой опоры (с), т. е. при снижении первой критической скорости. Следовательно, даже при малой величине вязкого трения (например, при естественном демпфировании), выбрав достаточно малую жесткость упругой опоры и, следовательно, расположив первую критическую скорость на малых оборотах, можно добиться небольших амплитуд колебаний ротора при прохождении зоны первой критической скорости. Это подтверждается многочисленными экспериментами и длительной эксплуатацией многих роторных машин с такой динамической схемой. Давления ротора на упругую опору. Отбросив мысленно вал и заменив его действие на упругую опору искомой реакцией R, запишем дифференциальные уравнения движения опоры: -ау - су + R 1у» cz + Rxz- (3.73) Применив комплексную подстановку (3.58), получим ;?1 - + а9 + me. Использовав (3.59), (3.61), (3.63), найдем относительное давление на упругую опору . 1 откуда hsc \~y(l~d)+ 2yvl Ri = hscq. (3.74) (3.75) Здесь введено обозначение P = mlVBo, (3,76) которое учитывает действие инерционных сил упругой опоры. Из (3,74) находим (I - Р>у2)242 (23)2 [1 - (1 - d)va]2 + v2(2v)2 • Известно, что в системах, подобных рассматриваемой, имеющих один демпфер с линейным законом сопротивления, существуют 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 [ 20 ] 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |
||||||||||||||||||||||||||||||||||||||||||||||||