

|
|

|
Промышленный лизинг
Методички
ческой неуравновешенности ротора и форма резонансных колебаний имеет вид конуса с вершиной в точке, соответствуюш,ей центру тяжести (рис. 3.19). Если же критическая скорость определяется по формуле (3.110), то ось ротора описывает цилиндрическую поверхность (рис. 3.20). При этом резонансные колебания зависят только от эксцентриситета ротора, динамическая неуравновешенность ротора на них не влияет. В обоих резонансных случаях имеет место прямая синхронная прецессия (рис. 3.19, 3.20), в первом случае коническая, во втором - цилиндрическая [15].  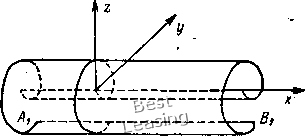 Рис. 3.19. Коническая прецессия ротора Рис. 3.20. Цилиндрическая прецессия ротора Рассматриваемая роторная система имеет четыре колебательные степени свободы и, следовательно, должна иметь четыре критические скорости. Две из них определены равенствами (3.106). Две другие могут быть найдены как корни другого частотного уравнения /iH = o, (3.111) отличаюшегося от (3.105) тем, что разность моментов инерции (В - А) заменяется их суммой (В + А), Однако критические скорости, являюш,иеся корнями частотного уравнения (3.111), не проявляются, как это видно из (3.104), если вынужденные колебания вызываются статической и динамической неуравновешенностями. Как и в ранее рассмотренном случае вала, враш,ающегося в шарнирной и упругой опорах, эти критические скорости могут проявиться, если возмущающая сила является синусоидальной силой постоянного направления. Однако такие возмущающие силы на практике, как правило, не встречаются. Эффект самоцентрирования. Найдем предельные значения постоянных Ui, аз, bj, bg, определяемых равенствами (3.104), при неограниченном возрастании угловой скорости вала: lim «1 = /б cos е - е; lim а. /гб cos 8 - е; lim bi = /i6 sin 8; lim bo = L8 sin e. (3.112) Внеся найденные предельные значения постоянных в уравне-iiHH (3.103), получим значения координат при неограниченном возрастании угловой скорости вала: lim Ух lim Zi lim У2 6) > 00 е cos о>/ + /i6 cos (ш/ - е); е sin О)/ + lid sin (ot - е); е cos (ot - /36 cos ((ot - e); e sin со/ - sin (ш/ - e). (3.113) Чтобы определить предельные значения координат центра тяжести вала и угла отклонения его главной центральной оси инерции от геометрической оси вращения, подставим предельные значения координат (3.113) в уравнения (3.101). В результате получим: lim у, = 0; lim pi = 0; ] (0->оо Сй->оо lim Z, = 0; lim 71 = 0. Сй->оо (3.114) Следовательно, при неограниченном возрастании угловой скорости вращения вал, статически и динамически неуравновешенный, сдвигается, совместив ось вращения с главной центральной осью инерции. При неограниченном увеличении частоты вращения жесткий ротор, вращающийся в двух упругих опорах, располагается так, что устраняется его статическая и динамическая неуравновешенности. Ротор с четырьмя степенями свободы (не считая вращения вокруг оси) обладает замечательным свойством самоцентрирования [42, 43]. Это свойство находит широкое применение при конструировании современных высокооборотных роторных машрш. Динамика жесткого ротора, вращающегося в двух упругих опорах, рассматривалась В. Блессом [118] и Б. Дизиоглу [119]. В работе В. Блесса вынужденные колебания статически и динамически уравновешенного ротора вызываются двумя малыми массами, присоединенными к ротору эксцентрично в двух параллельных радиальных плоскостях. В работе Б. Дизиоглу исследовались вынужденные колебания вертикального ротора, вызванные одной массой, эксцентрично присоединенной к ротору. В обоих случаях не учитывалось влияние присоединенных масс на изменение моментов инерции ротора, и неуравновешенность задавалась весьма частным образом, поэтому в этих работах не мог быть обнаружен эффект самоцентрирования жесткого ротора, вращающегося в двух упругих опорах. Б. Дизиоглу, специально исследовавший этот вопрос, приходит к ошибочному выводу об отсутствии самоцентрирования при неограниченном возрастании частоты вращения. Заметим, что влияние вязкого трения на вынужденные колебания жесткого ротора, вращающегося в двух упругих опорах, не нарушает эффекта самоцентрирования [14]. Давления между ротором и подшипниками. Давления на корпус. Для нахождения давлений между ротором и упруго закрепленным в корпусе машины подшипником преобразуем уравнения вынужденных колебаний (3.103), введя новые постоянные г, Х» "Ф» связанные с прежними постоянными соотношениями: fli = Tj cos х; bx = Гх sin %; «3 = 2 cos л]); Ьз = г2 sin я?. (3.115) В новых величинах уравнения вынужденных колебаний ротора примут простой вид: Г1 cos {(ot - х); 2i = Гх sin {(dt - х); У2 = Г2 cos {(dt - я)); га = sin (ayt - ip). (3.116) Согласно этим уравнениям движения заключаем, что вынужденные колебания ротора, вызванные его статической и динамической неуравновешенностями, являются прямой синхронной прецессией. Таким образом, и в этом случае статическая и динамическая неуравновешенности не могут вызвать вынужденных колебаний, соответствующих обратной прецессии ротора. Это объясняется тем, что возмущающая сила, вызванная неуравновешенностью, вращается вместе с ротором синхронно. Перейдем к определению добавочных динамических составляющих давлений, возникающих между ротором и подшипниками, зажатыми в упругой среде, при вынужденных колебаниях, вызванных статической и динамической неуравновешенностями ротора (рис. 3.21). Для определения давлений отбросим мысленно ротор, заменив его действие на опоры искомыми реакциями. Для левого подшипника (рис. 3.21) дифференциальные уравнения движения будут: mdji = -СхУх + Riy\ tuxit - -CxZy + Rx- (3.117) Соответственно для правого подшипника дифференциальные уравнения движения запишутся в виде: 2У2 ~Т~ Ryy (3.118) В этих уравнениях mi, ma - массы левого и правого подшипников, причем под массой подшипника следует понимать массу его частей, колеблющихся, но не участвующих во вращательном движении вместе с ротором; Ri и R - искомые реакции. 144 Внеся в уравнения (3.117) и (3.118) значения координат Ух, У2У 2 согласно (3.116), после несложных преобразований, найдем: 1 = (1 - 1(0) i; R2 {С2 - т2() г2 (3.119) Из этих уравнений следует, если между массами подшипников, коэффициентами жесткости упругого поля опор и угловой скоростью будут существовать зависимости: (3.120) 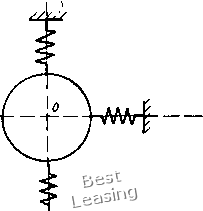 /7777 Рис. 3.21. Упругая опора ТО радиальные давления между ротором и подшипниками обратятся в нуль. Следовательно, если рабочая частота вращения ротора постоянна, то можно определить массу опоры и коэффициент жесткости упругого поля так, чтобы на заданной частоте вращения динамические давления между ротором и опорой обращались в нуль. На рис. 3.12 представлены зависимости давления от частоты вращения, рассчитанные для кон- - кретного ротора в двух случаях: при жестких и при упругих опорах. Если рабочая скорость машины изменяется в некоторых пределах (для рис. 3.12, например, от 50-10 до 70-10 об/мин) то, располагая нулевое значение реакции посередине, можно получить незначительные величины реакций во всем диапазоне рабочих частот вращения. Следует, однако, иметь в виду, что коэффициенты жесткости упругих опор выбираются прежде всего из условий правильного расположения второй критической скорости, поэтому не всегда удается в точности удовлетворить равенствам (3.120). Однако и в этом случае реакции при упругом креплении опор будут значительно меньше, чем при жестких опорах, так как из (3.119) следует, что они пропорциональны амплитудам колебаний, которые у ротора, вращающегося в упругих опорах в зоне самоцентрирования, несравнимо меньше, чем у ротора, вращающегося в жестких опорах. В конструкциях роторных машин встречаются случай, когда оба подшипника запрессованы в общей втулке, колеблющейся вместе с ротором. В этом случае [42, 43] условия равенства нулю динамических реакций между ротором и подшипниками даются равенствами: 1> - я* 1 "I" 2 . J {Сх -\- С2) 12 2 121) С2 h где /1, /2 - расстояния от центров левого и правого подшипников до центра инерции втулки (с подшипниками); М - масса втулки с подшипниками; / - момент инерции втулки относительно центральной оси, перпендикулярной к оси ротора. Следует заметить, что для большинства высокооборотных роторных машин запрессовка подшипников в общую втулку, колеблющуюся вместе с ротюром, нецелесообразна, так как минимизация реакций упругих опор обычно приводит к необходимости уменьшать их массу до пределов, допускаемых требованиями прочности. Давления вращающегося вала через подшипники и упругое поле передаются на неподвижный корпус машины. Для их расчета могут быть полезны следующие соображения. При самоцентрировании исчезает статическая неуравновешенность, упругое поле при этом сжимается на величину эксцентриситета. Модуль давления на корпус в этом случае (3.122) Одновременно при самоцентрировании исчезает динамическая неуравновешенность. Вал поворачивается на угол б, сжимая упругое поле. Модуль момента пары сил, действующей на корпус, может быть подсчитан по формуле Ml = б/ 2 1 "h 2 (3.123) Сила D и пара сил М- вращаются вместе с ротором, являясь возмущающими факторами, приложенными к корпусу машины, и передаются через корпус на фундамент. Эти факторы при упругом креплении опор существенно уменьшаются по сравнению с их значениями при жестком креплении опор. Формулы (3.122) и (3.123) подтверждают необходимость возможно более точной статической и динамической балансировок роторов. Формы колебаний. До начала 50-х годов в динамике вращающихся валов в основном разрабатывались методы определения критических скоростей и теория балансировки роторов. В этом плане, влияние упругих опор сказывалось на снижении всего спектра критических скоростей вала. Этим обычно и ограничивались познания в этом вопросе. Между тем сейчас очевидно, что это свойство упругих опор отнюдь не является главным. Для увеличения ресурса роторных машин важным является уменьшение резонансных амплитуд колебаний вала и связанный с этим легкий переход через критические скорости, а также эффект самоцентрирования и снижение давлений в опорах. Если в прошлом основная задача инженера при конструировании заключалась в том, чтобы отодвинуть в сторону больших частот вращения первую критическую скорость и освободить от нее зону рабочих скоростей, то в настоящее время прогрессивными методами в конструировании является создание жестких роторов, вращающихся в упругих опорах в зоне самоцентрирования, т. е. в зоне, расположенной выше второй критической скорости. При этом снил<аются амплитуды колебаний, реакции в опорах, уменьшаются габариты и масса роторных машин. Существенным преимуществом этого способа конструирования является отсутствие изгибных колебаний ротора во всем диапазоне скоростей. Действительно, рассмотрим формы колебаний вращающегося валапри различных способах крепления опор. На рис. 3.22 слева показаны формы колебаний при бесконечно податливых опорах; 2 2г*< Рис. 3.22. Влияние податливости подшипников на форму колебаний ротора: / - первая форма; 2 - вторая; 3 - третья; 4 - четвертая посередине - при опорах конечной жесткости; справа - при бесконечно жестких опорах. При жестких опорах первой критической скорости соответствует изогнутая форма колебаний вала. При достаточно податливых опорах (по сравнению с валом) рал проходит первую и вторую критические скорости как жесткий, образуя цилиндрическую и коническую прецессии. Таким образом, к такому валу применять широко распространенный термин - изгибные колебания - было бы неверно. Правильнее называть колебания такого вала поперечными. Устарело и не может применяться широко распространенное деление вращающихся валов на жесткие (вращающиеся ниже первой критической скорости) и гибкие (вращающиеся выше первой критической скорости). Действительно, вал, установленный в достаточно податливые опоры, остается жестким до подхода к третьей критической скорости, поэтому точнее делить вращающиеся валы на докритические и закритические, не связывая эти понятия с изгибом вала. Линеаризация динамической роторной системы. Самоцентрирование неуравновешенного ротора, вращающегося в двух упругих опорах, наступает после перехода через зону второй критической скорости при дальнейшем неограниченном возрастании угловой скорости, причем вал рассматривается абсолютно жестким. Но вал можно считать абсолютно жестким только в определенных 10* - 147 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 [ 23 ] 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |