

|
|

|
Промышленный лизинг
Методички
границах частот вращения. Даже если опоры очень податливы, третья критическая скорость связана с изгибом вала. В связи с этим представляет интерес динамика вала, установленного в упругие опоры в зоне резонансов третьего и более высоких порядков. Так как частота вращения роторных машин непрерывно растет, то эта проблема становится актуальной при создании новых высокооборотных изделий. Теоретически этот вопрос наиболее полно исследован М. Ф. Зейтманом [34], который определил для ряда роторов различных применяемых конструкций расположение первых трех критических скоростей. При этом оп пришел к выводу об ограничении зоны рабочих скоростей вала, установленного в две- упругие опоры, третьей критической скоростью. Однако в этой работе не учитывалось естественное демпфирование, всегда существующее у реальных валов. С другой стороны, можно предполагать, что эффект самоцентрирования до подхода к третьей критической скорости будет достаточным, чтобы практически исчезли возмущающие силы, вызванные неуравновешенностью вала, вследствие чего при переходе через зону третьей критической скорости не возникнут амплитуды колебаний большой величины [3]. Ответ на этот существенно важный вопрос можно было получить экспериментально. Для этого на специальном стенде испытывался горизонтальный вал с насаженным посередине диском. Для передачи вращения испытуемому валу была применена муфта «двойной кардан», которая обеспечивала надежную передачу вращающего момента и вместе с тем относительную свободу перемещения вала в радиальном направлении (жесткость муфты в радиальном направлении ничтожна по сравнению с жесткостью упругих опор). Конструкция подшипниковых опор позволяла производить как жесткое, так и упругое крепление подшипников. В последнем случае подшипник крепился к трем симметрично расположенным пружинам равной жесткости Ci. Упругое поле такой системы при малых колебаниях можно считать однородным с результирующей радиальной жесткостью с. При измерении колебаний вала чувствительными элементами являлись индуктивные датчики, которые жестко крепились к станине. Сигналы, снимаемые с датчиков, усиливались восьмика-нальной тензостанцией 8АНЧ и далее поступали на двенадцати-канальный шлейфовый осциллограф К-105, где они регистрировались на движущуюся с постоянной скоростью пленку. Рассматривались колебания вала как в вертикальной, так и горизонтальной плоскостях в различных точках вала. Визуальное сравнение на экране осциллографа сигналов, поступающих от датчиков, установленных в различных точках, позволяло судить о форме колебаний вала и, следовательно, о порядке проходимых критических скоростей. Для подсчета частоты вращения испытуемого вала на фотопленку записывался сигнал от датчика оборотов вала и сигнал стандартной частоты 50 Гц. 148 Испытывался вал длиной 770 мм и массой 1850 г, установленный в двух одинаковых подшипниках скольжения, с диском массой 2760 г, установленным посередине вала. Длина вала между центрами подшипников 650 мм, диаметр цапф 20 мм, длина подшипников 20 мм, зазор 0,02 мм. Коэффициент жесткости упругого поля опор с = 18 кгс/см. Л\асса подшипника с присоединенными колеблющимися, ио не вращающимися частями 360 г, масса муфты 487 г. Подшипники цилиндрические, стальные, с впрессованным бронзовым вкладышем. Смазка подшипников производилась от маслостанции турбинным маслом под давлением 2 кгс/см, которое поддерживалось постоянным на входе подшипников. Частота вращения вала изменялась ступенчато от 400 до 18 000 об/мин через каждые 200 об/мин. Сопоставление расчет-ных и экспериментальных значений критических скоростей дано в табл. 3.5. Результаты обработки осциллограмм представлены амплитудно-частотной характеристикой А на рис. 3.23. Уровень вибрации вала при переходе через кри-
6 6 16-ю\о5/мин Рис. 3.23, Амплитудно-частотная характеристика ротора в упругих {А) и жестких (В) опорах Таблица 3.5. Критические скорости вала (об/мин) тическую скорость 3 равен 0,3 мм, что значительно ниже уровня вибраций на первой (0,48 мм) и второй (0,58 мм) критических скоростях. Ротор, установленный в упругие опоры, легко переходит не только через первую и вторую критические скорости, но и через третью критическую скорость. За третьей критической скоростью расположена вторая зона самоцентрирования (от 7000 до предельной скорости, достигнутой в эксперименте, 18 000 об/мин, где уровень вибрации равен 0,1 мм и не превышает уровня вибрации в первой зоне самоцентрирования (2200-5000 об/мин). Все эти критические скорости, измеренные экспериментально, хорошо совпадают с их расчетными значениями. Таким образом, опасения [34] об ограничении третьей критической скоростью зоны рабочих скоростей вала, вращающегося в двух упругих опорах, экспериментом не подтверждаются, поскольку при упругих опорах снижается общая жесткость
системы и вследствие этого уменьшается собственная частота. Отношение коэффициента естественного демпфирования к собственной частоте, определяющее уровень вибрации при прохождении через резонансные зоны, в связи с этим резко возрастает. Это отношение становится вполне достаточным для снижения резонансных амплитуд, включая третью критическую скорость, до допустимого уровня, поэтому нет необходимости в установке искусственных демпферов, вносящих, как правило, новую нелинейность и добавочные зоны повышенной вибрации. Для сопоставления были проведены испытания того же ротора при жестком креплении подшипников к корпусу стенда. Амплитудно-частотная характеристика, полученная в результате обработки снятых осциллограмм, представлена на рис. 3.23, кривая В. Вследствие увеличения общей жесткости системы ротор-подшипники первая критическая скорость приходится на более высокие частоты вращения (3000 об/мин). С 5000 об/мин начинается резкий подъем уровня вибрации, который к 7000 об/мин достигает величины ~1,2 мм, не допустимой при эксплуатации; этот уровень колебаний остается неизменным в диапазоне 7000- 18 000 об/мин, т. е. до предела частоты вращения, достигнутого в эксперименте. При упругом креплении опор (кривая А) на всем диапазоне скоростей вращения, включая критические скорости, частота колебаний совпадает с частотой вращения вала. Следовательно, система совершает вынужденные колебания, вызванные неуравновешенностью. \ Совсем иная картина колебаний при жестком креплении опор ротора. До 6000 об/мин частота колебаний совпадает с частотой вращения вала; начиная с 7000 об/мин возникают колебания с частотой, равной собственной частоте, соответствующей первой критической скорости (3000 об/мин). Колебания с этой частотой продолжаются непрерывно от 7000 до 18 ООО об/мин. Таким образом, в этой широкой зоне, где должны располагаться рабочие режимы, развиваются стойкие автоколебания большой амплитуды [3, 57], вызванные нелинейными силами смазочного слоя. , Сопоставляя эти эксперименты, заключаем: применение упругих опор линеаризует динамическую систему ротор-подшипники скольжения. Автоколебания - явление, вызванное нелинейностью гидродинамических сил смазки, - при упругом креплении опор полностью исчезают, и динамическая система идентична линейной. 5. Самоцентрирование и уравновешивание высокооборотного компрессора Разработанная выше теория самоцентрирования жесткого ротора, вращающегося в двух упругих опорах, нашла практическое воплощение в высокооборотном компрессоре транспорт--ного газотурбинного двигателя [54]. При конструировании современных высокооборотных газотурбинных двигателей, для нормальной эксплуатации необходимо получить широкую область рабочих частот вращения, свободную от критических режимов и иных зон усиленной вибрации. Необходимо обеспечить в процессе запуска и на рабочих режимах малые перемещения ротора, чтобы выдержать допустимые радиальные зазоры между ротором и статором. Для надежности конструкции и достаточного ресурса необходимо, чтобы виброперегрузки в опорах на рабочих скоростях и при прохождении критических скоростей были достаточно малы. 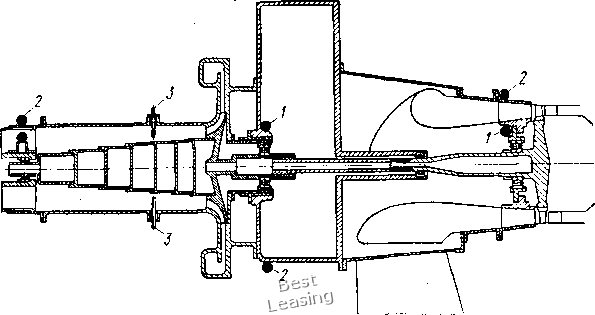 Рис. 3.24. Схема экспериментальной установки газотурбинного двигателя Точная первоначальная балансировка роторов двигателя необходима, но она дает только частичный эффект, так как остающаяся статическая и динамическая неуравновешенности при прохождении критических скоростей может создать большие виброперегрузки и недопустимые амплитуды колебаний ротора. Кроме того, в процессе эксплуатации роторов сложной конфигурации можно ожидать разбалансировку ротора из-за взаимного смещения деталей. В этом отношении из трех роторов, образующих рассматриваемый газотурбинный двигатель - компрессор, турбина компрессора, свободная турбина, - наибольшую вероятность разбалансировки представлял восьмиступенчатый компрессор (рис. 3.24). Чтобы избежать в зоне рабочих скоростей роста амплитуд колебаний и обеспечить работоспособность подшипников, можно избрать при конструировании высокооборотных роторов два пути: ранее применявшееся использование эффекта гибкого вала [73] или новый путь, конструируя жесткий ротор в двух упругих опорах, самоцентрирующийся после перехода через первые две критические скорости [42]. Первый путь не может быть использован по двум причинам. Во-первых, для пустотелых высокооборотных роторов сравни- тельно большого диаметра трудно совместить прочностные требования и переход через первую и вторую критические скорости при условии, что вторая критическая скорость должна быть расположена ниже начала зоны рабочих скоростей компрессора. Во-вторых, как известно 129, 30], одной из причин потери устойчивости вращающихся валов в закритической области является внутреннее трение, возникающее при изгибных колебаниях гибкого вала, поэтому при конструировании компрессора газотурбинного двигателя (рис. 3.24), зона рабочих частей вращения которого лежит в пределах 25 ООО-45 ООО об/мин, за основной был выбран второй путь. Этот путь позволяет понизить до необходимого значения первую и вторую критические скорости, увеличивая податливость упругих опор, но не уменьшая прочности ротора. Если зона рабочих скоростей не доходит до третьей критической скорости, то ротор колеблется как твердое тело, при этом напряжения вызванные изгибом, отсутствуют. Рассмотрим восьмиступенчатый компрессор, соединенный гибкой рессорой с турбиной компрессора (рис. 3.24), как жесткий горизонтальный вал, вращающийся в двух упругих опорах, центр тяжести которого расположен между опорами. Дифференциальные уравнения малых колебаний такого ротора, вызванные статической и динамической неуравновешенностями, определяются по формуле (3.102). Вынужденные колебания ротора компрессора находятся согласно (3.103) и (3.104), а критические скорости - из (ЗЛ06). При неограниченном увеличении угловой скорости ротора компрессора ось вращения совпадает с главной центральной осью инерции; т. е. ротор компрессора самоцентрируется. Однако для использования эффекта самоцентрирования в инженерной практике необходимо установить, как скоро после перехода угловой скорости через вторую критическую скорость наступает самоцентрирование, ибо рабочая скорость компрессора, как и любой машины, конечна, и самоцентрирование при неограниченном возраотании угловой скорости представляет только теоретический интерес. Решение этой последней задачи может быть получено быстрее всего экспериментально. Таким образом, при расчете и конструировании высокооборотного компрессора в соответствии с развитой теорией былипо-ставлены следующие цели: 1)расположить первую и вторую критические частоты вращения компрессора ниже 25 ООО об/мин, т. е. до начала рабочих оборотов; 2) использовать в зоне рабочих скоростей, предусмотренных техническим заданием, эффект самоцентрирования от 25 000"до 45 ООО об/мин; > 3) сконструировать ротор компрессора, который на всем диапазоне скоростей" от нуля до 45 ООО об/мин ведет себя как жесткий ротор и не испытывает изгибных колебаний; 4) рассчитать Достаточную податливость упругих опор с тем, чтобы обеспечить переход через первую и вторую критические скорости при допустимых виброперегрузках в опорах и малых амплитудах перемещений ротора компрессора, не прибегая к искусственному увеличению демпфирования. При конструировании компрессора основные его параметры были определены исходя из технического задания и расчета на прочность, поэтому для обеспече1ния динамики компрессора мог быть использован только выбор надлежащей жесткости обеих опор. Основные данные для расчета критических скоростей были следующими: i = 39,9 см; /х = 18,9 см; кгс-сСм"-; = 21 см; /а 7,55-10-3 = 0,1223 - кгс-см-с = 0,9898 кгс-см-с. м = А -В = Выбрав значения коэффи- 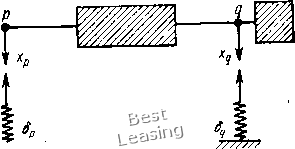 7777777 Рис, 3.25. Расчетная схема ротора гибкого циентов жесткости опор = 0,326-10* кгс.см-\ 2 = = 1,093-10* кгс-см", находим согласно (3.106) значения первой и второй критических скоростей: = 13 200 об/мин; Да = 27 800 об/мин. При этом вторая критическая скорость лежит немного выше нижней границы зоны рабочих скоростей. Учет податливости ротора. Рассмотренная выше динамика жесткого ротора, вращающегося в двух упругих опорах, не учитывает гибкости самого ротора. Для проверки допустимости такого подхода рассмотрим динамику ротора с учетом упругости опор и гибкости самого ротора. Для расчета критических оборотов ротора воспользуемся методом динамических податливостей [30]. Под динамической податливостью упругой системы /у в сечении i понимается отношение амплитудного значения перемещения Ai i-ro сечения к амплитуде гармонической силы, приложенной в сечении / и вызвавшей это перемещение. Если точка приложения усилия и точка, в которой рассматривается перемещение, совпадают, то динамическую податливость назовем основной, в противном случае - смешанной. Рассмотрим ротор pq (рис. 3.25) на двух упругих опорах, податливости которых бр и б. Отбрасывая упругие опоры, заменяем их действие неизвестными амплитудными значениями усилий Хр и Хд. Так как в действительности при колебаниях ротора на опорах перемещения концов ротора и пружин совпадают, то можно записать уравнения: Лр Хрврр Хдврд ~ Хрвдр I qqq ХпВ/ X б • Хдбд. (3.124) (3.125) 153 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 [ 24 ] 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |
|||||||||||||||||||||||||||||||||||