

|
|

|
Промышленный лизинг
Методички
Здесь - динамические податливости свободного ротора, зависящие от угловой скорости со, причем ер, = е,,, (3.126) Полученная система линейных уравнений относительно неизвестных амплитуд усилий будет однородной, так как при определении собственных частот внешние нагрузки отсутствуют. Условием нетривиального решения системы, что должно иметь место, так как ротор совершает колебания, будет равенство нулю ее определителя 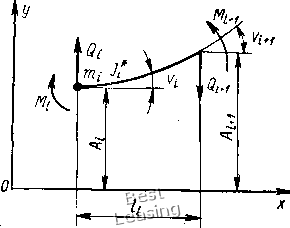 pq Рис. 3.26. Выбор знаков перемещения, угла поворота, изгибающего момента и перерезывающей силы (3.127) Решая это уравнение графически, находим собственные частоты вращения ротора. Для определения динамических податливостей ротор делится на соответственно выбранное число участков. При наличии сосредоточенных масс в точках их приложения проводятся границы участков: распределенная масса каждого участка делится на две половины, которые сосредоточиваются по концам участка. Таким образом, участок оказывается невесомым между каждыми двумя сече-•ниями, а в самом сечении сосредоточенная масса (которая в частном случае может быть и нулевой) увеличивается на полусумму масс двух прилегающих к этому сечению участков. Сечение проводится непосредственно слева от сосредоточенной массы т; в частном случае может быть участок нулевой длины, но имеющий отличную от нуля массу. В каждом i сечении имеем четыре величины: перемещение Ai\ угол поворота Vi, изгибающий момент Mi и перерезывающую силу Q-. Выбор знаков этих величин показан на рис. 3.26. Для участка длиной 1 при различных значениях о) можно написать четыре уравнения: - Qi +m,o)M,; „ (3.128) (3.129) (3.130) (3.131) где первых два представляют собой уравнения равновесия. Два других являются уравнениями деформации участка, рассматриваемого как консоль, заделанная на левом конце под соответствую-154 Mi+i - Mi + liQi+iJtcava щим углом Vi и деформирующаяся под действием приложенных на правом конце силы Q+i и момента Af+j. Величина Л = Jsi{l - Jpi/Jsck) (3.132) -диаме- учитывает влияние гироскопического эффекта. Здесь -полярный момент инерции i-й массы; тральный момент инерции t-и массы; к = , где - круговая частота собственных колебаний; (и - угловая частота вращения ротора. В случае прямой синхронной прецессии о) = о),. В систему (3.128)-(3.131) входят коэффициенты влияния А.-, Pj, б, характеризующие податливости 1~го участка и имеющие простой физический смысл - это перемещение свободного конца участка при заделке на другом: Ki - угловое перемещение, вызванное единичным моментом; Р; - поперечное перемещение от единичного момента; б - поперечное перемещение, вызванное единичной силой. Зная коэффициенты влияния на каждом участке, переходим к определению динамических податливостей ротора в точках р и q. Приложим в точке р единичную силу. Тогда динамические податливости системы врр и е будут совпадать с перемещениями точек р и q, г. е. с Ар и Aq. В первом сечении принимаем А-р ~ = Аху Vip = Vi] Ml = 0; Qi = 1, Далее, пользуясь уравнением (3.132), находим Ла, v,M з» Qa* по которым определяем все величины в третьем сечении и т. д. В каждом сечении получаем значения перемещений и усилий как функции начальных неизвестных Al и Vii (3.133) Ha правом свободном конце ротора изгибающий момент и перерезывающая сила должны быть равны нулю: 0; 0. (3.134) (3.135) Решая эту систему, находим Лх и и, с помощью которых можем найти податливость в любом сечении: е,р = Л;. Таким образом, е„р = Л = Лх и е X - РР * * /j - Затем прикладываем единичную силу в точке q. Тогда, в первом сечении Aiq = Л1; viq = Vi\ Mi = 0; Q = 0. Переходя от участка к участку по (3.128)-(3.131), в каждом сечении получим систему, аналогичную (3.133), причем коэффициенты с] и d] будут совпадать с соответствующими коэффициентами и dj в (3.133), а свободные члены равны нулю. Наконец, в системе (3.134)-(3.135) будет h"" = О, /гП> = i. Определив из второй системы Ах = врд и vu находим Ад = вдр. Значение А[ должно совпадать с полученным в первом случае значением Л, так как вдр, что служит для проверки расчета. Расчет ротора по данной методике произведен на ЭВМ. Критические частоты вращения ротора с учетом его гибкости оказались равными:. Ml = 11 600 об/мин; Д2 = 23 900 об/мин. Сопоставляя значения первых и вторых критических частот вращения ротора, вычисленных без учета его гибкости и с учетом последней, заключаем, что отклонения в значениях критических частот вращения незначительны. Они лежат в пределах точности обоих методов расчета. Ротор можно рассматривать как жесткий. Заметим, что о допустимости рассмотрения ротора как жесткого, можно судить и другим путем, сравнивая податливость ротора как свободно опертой балки. Для рассматриваемого компрессора податливости опор равны первой опоры - 307,0-10- см-кгс"; второй опоры - 91,5 X X 10 см -кгс". Податливость ротора в центре тяжести, если его рассматривать как балку, свободно опертую на жестких опорах, равна 30,0 • 10 см •.кгс" Таким образом, вал жестче опор: первой в десять раз и второй в три раза. Кроме того, необходимо определить вышеприведенным методом динамических податливостей собственную частоту изгибных колебаний свободно плавающего ротора компрессора. Значение этой частоты близко к третьей критической скорости компрессора, форма колебаний которой связана с изгибом вала. Для рассматриваемого компрессора собственная частота свободно плавающего ротора превышает более чем в два раза частоту, равную максимальной рабочей частоте вращений. Таким образом, ротор компрессора при частоте вращения, равной 45 ООО об/мин, находится далеко от третьей критической скорости и, следовательно, при найденных соотношениях податливости ротора и опор может рассматриваться как твердое тело во всемдиапазоне скоростей от нуля до 45 ООО об/мин. Экспериментальные исследования. Для экспериментального определения амплитудно-частотных характеристик, виброперегрузок и эффекта самоцентрирования ротора компрессора была 156 создана специальная установка. На рис. 3.24 представлена схема жспериментальной установки, представляющей собой часть пол-поразмерного газотурбинного двигателя, состоящего из восьми-ступенчатого компрессора, соединительной гибкой рессоры и турбины компрессора. Соединение двух роторов посредством гибкой рессоры позволяет рассматривать ротор компрессора и ротор турбины при изучении поперечных колебаний независимо друг от друга, так как гибкая рессора передает вращающий момент, по практически исключает взаимное влияние роторов на поперечные колебания ввиду весьма Таблица 3.6. Податливость опор (СМКГС")
малой жесткости в поперечном направлении. Места установки внутренних датчиков для измерения виброперегрузок в опорах обозначены цифрой /, места установки акселерометров для измерения виброперегрузок (в креплениях опор к корпусу летательного аппарата) отмечены цифрой 2 и места установки прогибомеров для измерения перемещений компрессора - цифрой 3. Установка приводилась во вращение сжатым воздухом от стационарного компрессора. Диапазон скоростей вращения установки - от 5000 до 50 ООО об/мин. Предусмотрена возможность ступенчатого изменения угловой скорости через 500 или 1000 об/мин. Для уменьшения потребной мощности на раскрутку установки лопатки компрессора были заменены грузами с эквивалентными массами. Балансировка компрессора, соблюдение соосности опор и зазоры в подшипниках были такими же, как и на полноразмерном изделии. Зоны критических скоростей определялись, с одной стороны, по показаниям пьезоэлектрических акселерометров,которые измеряли уровень вибраций опор компрессора, с другой - по показаниям прогибомеров, которые измеряли перемещения ротора компрессора. Акселерометры и прогибомеры устанавливались в двух взаимно перпендикулярных плоскостях - вертикальной и горизонтальной. Опыты проводились при трех вариантах опор компрессора Первая опора (табл. 3.6) имела во всех экспериментах одинаковый упругий элемент, создававший однородное упругое поле с податливостью б = 307-10- см-кгс" Вторая опора менялась как по величине податливости, так и по конструктивному выполнению. В первом варианте вторая опора была жесткой, во втором- имела масляный демпфер; податливость упругого элемента демпфера которая была одновременно равнялась б =91,5-10 см кгс заложена в теоретические расчеты. Упругий элемент (рис. 3.27) выполнен в виде втулки с аксиальными прорезями и отделен тонким масляным слоем от статора. В третьем варианте вторая опора была чисто упругой (рис. 3.28), причем податливость упругого радиального поля выбиралась двояко: 8 135 • 10" см-кгс~; ба = 286-10" см-кгс", что достигалось изменением толщины упругого элемента: 0,9 и 0,7 мм. Результаты эксперимента в первом варианте представлены на рис. 3.29 по первой опоре и на рис. 3.30 по второй. По оси абсцисс даны частоты вращения компрессора в оборотах в минуту, :ZZZ22ZZZZZZ  Рис. 3.27. Схема упругого элемента с масляным демпфером Рис. 3.28. Упругая опора а по оси ординат - виброперегрузки - отношение измеренного ускорения к ускорению силы тяжести. На рис. 3.29-3.39 сплошной линией обозначены показания вертикального датчика, штриховой - горизонтального. Зона первой критической скорости расположена в районе 13 ООО-15 ООО об/мин. Как видно из рис. 3.29, благодаря упругости первой опоры, эта критическая скорость проходится с небольшой перегрузкой, не более 9 на первой опоре. В зоне второй критической скорости, расположенной вблизи 30 ООО об/мин, перегрузка на первой упругой опоре резко возрастает, достигая 125. Далее, после спада, перегрузка вновь возрастает, достигая на 40 ООО и 45 ООО. об/мин 30. Как видно из рис. 3.30, на второй жесткой опоре происходит монотонное возрастание перегрузки до 39g в зоне второй критической скорости. Далее, после небольшого спада, на частотах вращения 40 ООО- 45 ООО об/мин перегрузка вновь возрастает до 36. Замерить в этом эксперименте зависимость перемещений компрессора от частоты вращения не удалось, так как из-за большой амплитуды колебаний прогибомеры вышли из строя. Результаты эксперимента объясняются следующими соображениями. Симметричный, ротор в одной упругой и второй шарнирной жесткой опоре проходит первую критическую скорость как жесткий вал, описывая вокруг оси, проходящей через шарнир, коническую круговую поверхность, поэтому переход через 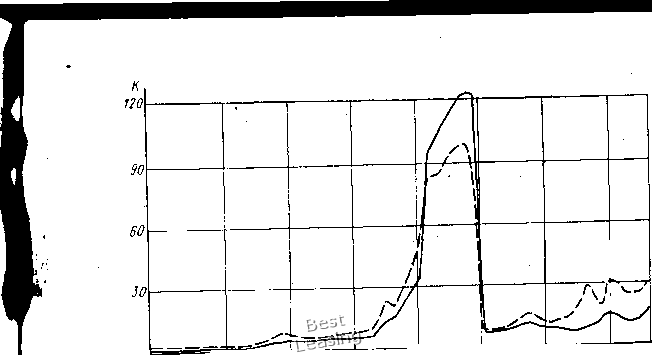 5000 10000 15000 20000 ?Ш0 30000 55000 n.oSMuH Рис 3.29. Зависимость виброперегрузок на первой опоре от частоты вращения компрессора (внутренние датчики): первая опора упругая с кольцом h - 0,5 мм; вторая опора жесткая 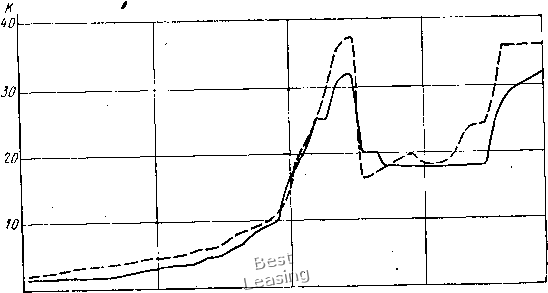 50000 15000 25000 55000 о51мии Рис. 3.30. Зависимость виброперегрузок от скорости вращения компрессора на второй опоре (внутренние датчики) 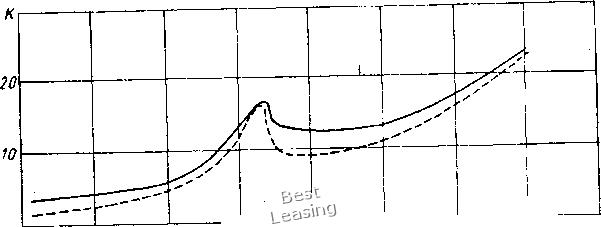 5т ~ шоо тоо 20000 25000 зоооо тоо шоо пм/мин Рис 3 31.* Зависимость виброперегрузок на первой опоре от частоты вращения компрессора: первая опора упругая с кольцом h = 0.5 мм; вторая опора демпферная 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 [ 25 ] 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |