

|
|

|
Промышленный лизинг
Методички
первую критическую скорость происходит при небольших виброперегрузках. Форма колебаний ротора при прохождении второй критической скорости определяется изгибом, а так как ротор компрессора по условиям прочности сконструирован весьма жестким на изгиб, то возникают весьма большие, недопустимые прн эксплуатации виброперегрузки.- Таким образом, ротор, вращающийся в одной упругой и второй шарнирной опоре, может быть использован только в зоне рабочих скоростей, расположенных ниже второй критической скорости, в данном случае - не выше 20 ООО об/мин, 5000 15000 25000 35000 п, о5/мин Рис. 3.32. Зависимость виброперегрузок от частоты вращения компрессора для второй опоры Результаты эксперимента при втором варианте опор представлены на рис. 3.31-3.33. По первой опоре (рис. 3.31) происходит возрастание виброперегрузки с увеличением частоты вращения. При этом в зоне рабочих скоростей от 25 ООО до 45 ООО об/мин перегрузки возрастают от 20 до 37", достигая недопустимых прн эксплуатации величин. По второй демпферной опоре (рис. 3.32) перегрузка медленно, но неуклонно возрастет до 9 на 37 ООО об/мин. Далее перегрузка растет быстрее, достигая 20 на 45 ООО об/мин. Зависимость перемещений ротора компрессора от частоты вращения (рис. 3.33) показывает, что первая критическая скорость не проявляется, однако вторая критическая скорость дает скачок амплитуды колебаний. На частоте вращения, равной 22 ООО об/мин, перемещения компрессора достигают 0,04 мм. Далее в зоне рабочих скоростей перемещения компрессора не снижаются ниже 0,01 мм. Таким образом, хотя по сравнению со второй жесткой опорой переход к демпферной опоре несколько снизил виброперегрузки и амплитуды колебаний, эти вибрационные характеристики все еще недопустимо высоки, и компрессор не пригоден к эксплуатации. Результаты эксперимента при третьем варианте опор [случай а] представлен на рис. 3.34-3,36. На первой опоре (рис. 3.34) виброперегрузки на всем диапазоне частот вращения от 5000 до 45 ООО об/мин не превышают 10. На второй опоре (рис. 3.35) виброперегрузки на том же диапазоне скоростей не превосходят 15. 6,мм 0,0 0,03 0,01
5000 15000 25000 350UU п, оо/тин Рис. 3.33. Зависимость перемещений ротора компрессора от частоты вращения  5000 15000 25000 35000 Рис 3.34. Зависимость виброперегрузок на первой опоре от частоты вращения компрессора. Обе опоры упругие. Податливость втброи опоры = 135.10-6 см-кгс-1 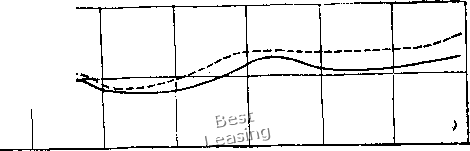 35000 5000 . 15000 25000 Рис. 3.35. Зависимость виброперегрузок на второй опоре •п,о5/мин 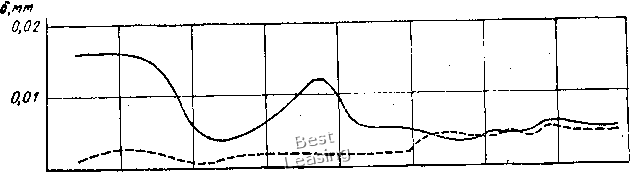 5000 15000 25000 35000 п,об/тн Рис. 3.36. Зависимость перемещений ротора компрессора от частоты вращения 11 А. с. Кельзон и др. На графике (рис. 3.36) дана зависимость перемещений компрессора от частоты вращения. Четко видна первая критическая скорость, расположенная вблизи 10 ООО об/мин и вторая - около 23 ООО об/миЦ, что хорошо совпадает с рассчитанными значениями. Некоторое снижение экспериментальных данных объясняется тем, что при расчете жесткость второй опоры была взята несколько большей, чем в эксперименте. Максимальные перемещения компрессора на первой критической скорости не превышают 0,017 мм, на второй - перемещения еще меньше, они равны 0,012 мм. Эти перемещения в 2,5- 3,0 раза меньше, чем в случае второй демпферной опоры (второй вариант). В зоне рабочих частот вращения от 25 ООО до 45 ООО об/мин перемещения компрессора уменьшаются до 0,005 мм, т. е. лежат ниже уровня чувствительности прогибомеров. Эксперимент подтверждает эффект самоцентрирования компрессора после перехода через первую и вторую критические скорости. Как видно из рис. 3.36, эффект самоцентрирования наступает при частоте вращения, равной 26 ООО об/мин, т. е, через 3000 об/мин после прохождения второй критической скорости. Рассмотрим далее результаты, полученные при испытаниях третьего варианта опор [случай б], когда податливость второй опоры была увеличена примерно в два раза: бд - 286 X X 10"® смкгс~. Виброперегрузки на первой опоре в этом случае не превышают lOg" (горизонтальный датчик) и 5 (вертикальный датчик), а на второй опоре, монотонно возрастая, достигают на 45 ООО об/мин величины 13 (вертикальный датчик). Перемещения компрессора (рис. 3.39) не превышают 0,017 мм на первой критической скорости, равной 11 ООО об/мин. Они снижаются до 0,008 мм на второй критической скорости, расположенной вблизи 22 ООО об/мин. На рабочих скоростях от 25 ООО до 45 ООО об/мин наступает самоцентрирование и перемещения уменьшаются до 0,003 мм. Рассмотренная динамика высокооборотного ротора компрессора позволяет сделать следующие выводы. 1. Высокооборотные роторы следует конструировать в двух упругих опорах, выбирая податливость опор не менее чем на порядок больше, чем податливость ротора в его центре тяжести. Ротор рассматривается как балка, свободно лежащая на жестких шарнирных опорах. 2. Первую и вторую критические скорости жесткого ротора, вращающегося в двух упругих опорах, следует располагать ниже начала зоны рабочих частот вращения, так, чтобы вторая критическая скорость находилась несколько ниже начала рабочей частоты вращения. 3. В зоне рабочих частот вращения следует при этом использовать эффект самоцентрирования жесткого ротора, вращающегося в двух упругих опорах, 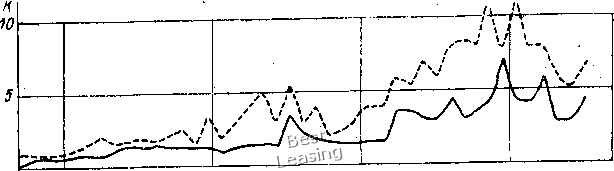 1000Q 20000 30000 0000 п, об/тин Рис 3 37 Зависимость виброперегрузок на первой опоре от частоты вращения компрессора. Обе опоры упругие. Податливость второй опоры бо == 286.10-6 см-кгс- kOOOQ п,о51тин 10000 2000D OOOQO Рис. 3.38. Зависимость виброперегрузок на второй опоре 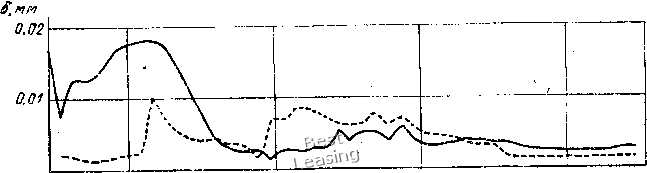 WOOQ 20000 JO ООО 0000 ппШин Рис. 3.39. Зависимость перемещений ротора компрессора от частоты вращения 4. Нет необходимости вводить искусственные демпферы, так как последние ые улучшают динамику ротора по сравнению с чисто упругими опорами. Естественное демпфирование, всегда присут- ствующее в роторных системах, достаточно для снижения амплитуд на критических скоростях. Искусственные демпферы обычно нелинейны и вносят в динамику новые зоны повышенной вибрации. 5. Разработанный способ конструирования и расчета позволяет создать высокооборотные роторы, не испытывающие во всем диапазоне скоростей (расположенных ниже третьей критической скорости) изгибных колебаний. Во всем диапазоне частот вращения ротор ведет себя как жесткий. 6. Применение двух упругих опор обеспечивает переход через первую и вторую критические скорости с малыми виброперегрузками и небольшими амплитудами колебаний. 7. Эффект самоцентрирования на рабочих частотах вращения приводит к значительному снижению давлений между ротором и подшипниками. Ресурс подшипников возрастает. Газотурбинный двигатель после приведенных выше испытаний выпускается серийно свыше десяти лет. 6. Линеаризация системы вал-подшипник введением линейной податливости в опору Уравнения движения ротора в упругом шарикоподшипнике с предварительным осевым натягом. Нелинейные жесткостные характеристики подшипников качения в значительной степени влияют на работоспособность всего механизма в целом. Появление субгармонических колебаний ротора, повышение общего уровня вибраций, трудности в расчете критических частот вращения - все это следствие нелинейности упругого поля подшипников. Применение упругих опор, линейных в пределах виброперемещений, допустимых в условиях эксплуатации, вносит определенные коррективы в нелинейные особенности системы ротор-опоры. В гл. 2 было показано, что введение в опору линейного упругого поля приводит к тому, что нелинейность, обусловленная деформацией контактирующих в процессе работы деталей подшипника, существенно снижается и жесткостная характеристика опоры стремится к линейной. Рассмотрим влияние линейного упругого поля на динамику ротора в подшипнике с осевым пружинным натягом на примере системы, представляющей собой симметричный ротор, опирающийся на одну шарнирную опору и одну упругую, расположенные по концам ротора. Упруго установленный шарикоподшипник имеет пружинный осевой предварительный натяг. Будем полагать, что упругое поле опоры, образуемое пружинами 1 (рис. 3.40, а), однородно, линейно и характеризуется коэффициентом жесткости Cj. Упругое поле собственно предварительно натянутого шарикоподшипника будем полагать однородным, но имеющим нелинейную жесткостную характери- стику, определяемую выражением (2.26), где под г будем понимать относительное сближение внутреннего и наружного колец подшипника. Воспользуемся уравнением движения ротора в виде (2.42) для ротора в шарнирной и упругой опорах. В этих уравнениях под Р {z) и Р (у) понимаем проекции на оси координат восстанавливающей силы, характер которой зависит от режима, в котором работает предварительно натянутый подшипник. В свете изложенного в гл. 2 следует считать, что упруго установленный радиально-упорный шарикоподшипник с осевым пружинным натягом может работать в двух режимах: 1) в режиме линейной упругой опоры при невыбранном усилии осевого предварительного натяга; 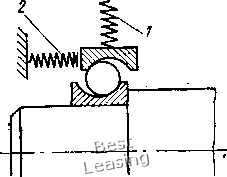 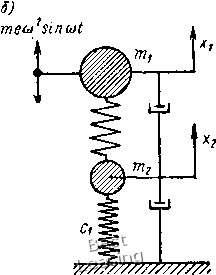 Рис. 3.40. Модель подшипника с предварительным натягом: а - схема подшипникового узла с предварительным натягом в упругом линейном поле; б - динамическая двух-массовая модель системы ротор-опора 2) в режиме упругого подшипника с нелинейной жесткостной характеристикой после нейтрализации усилия натяга динамическими нагрузками со стороны ротора, имеющего остаточную неуравновешенность. . Для анализа динамики реальной системы ротор-опоры заменим ее простейшей динамической двухмассовой моделью (рис. 3.40, б). Так как принято допущение об изотропности упругого поля опоры и гироскопические силы не учитываются, то, следуя А. Тондлю [100], можно в первом приближении исследовать движение в вертикальной и горизонтальной плоскостях независимо друг от друга. Обе массы последовательно соединены с корпусом, причем верхняя масса = Blt представляет собой массу ротора, приведенную к шарнирной опоре, а нижняя масса mg - масса колеблющихся частей опоры, включая массу наружного кольца подшипника и массу колеблющихся частей упругой подвески. Нижняя пружина модели заменяет упругое поле опоры линейной жесткостью Cj, верхняя пружина заменяет нелинейное упругое поле шарикоподшипника с преднатягом. Возмущающее 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 [ 26 ] 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |
|||||||||||||||||||||||||||||||||