

|
|

|
Промышленный лизинг
Методички
После прохождения зоны резонанса происходит постепенное осевое перемещение кольца до положения, соответствующего полностью выбранному натягу. Это смещение можно объяснить преобладающим действием центробежных сил шариков, причем, как видно из рисунков, максимальное осевое смещение наружного кольца достигается тем раньше, чем меньше усилие осевого натяга. На всех графиках прослеживается повторный значительный всплеск амплитуд. В системах с предварительным натягом это возрастание амплитуды совпадает с плавным осевым смещением наружного кольца за резонансом, т. е. соответствует сугубо нелинейной характеристике предварительно натянутого подшипника. Колебания ротора носят в этой зоне характер субгармонических порядка 1/2 и аналогичны полученным в результате моделирования системы на аналоговой машине. Частота колебаний в зоне 2 вдвое ниже основной частоты и изменяется с изменением частоты вращения ротора. Основная гармоника накладывается на субгармоническую составляющую. Это явление наблюдается на частотах, несколько меньших удвоенной собственной частоты системы, и прослеживается на разбеге й выбеге без признаков затягивания. В системе с зазором и малым натягом прослеживается подобное явление на частотах, меньших утроенной собственной частоты, но субгармоническая составляющая имеет здесь порядок 1/3. Все эти экспериментальные данные полностью согласуются с теоретическим обоснованием возможности субгармонических колебаний в роторных системах с подшипниками качения. Кроме того, подтверждается важный вывод, что при введении линейной упругости в опору, субгармонические явления приобретают резонансный характер. Увеличение усилия осевого натяга в рассматриваемой системе не устраняет субгармонический резонанс, но несколько сглаживает максимум субгармонической амплитуды, расширяя область этих колебаний. При усилии натяга Fq > 2,4 кгс на резонансных и зарезонансных частотах радиальные колебания носят неустойчивый, негармонический характер, распространяющийся с увеличением натяга на более высокие скорости ротора (заштрихованные области на рис. 3.48). Субгармонические колебания при больших натягах приобретают вид биений. При усилии натяга Fq < 2,4 кгс радиальные колебания ротора на зарезонансных частотах после прохождения зоны субгармоник приобретают синусоидальный, гармонический характер. Однако при малых натягах возможны интенсивные осевые колебания. Ротор в двух упругих подшипниках. Весьма существенным обстоятельством является то, что при той же статической и динамической неуравновешенности в системе с двумя упругими опорами резонансные зоны почти не проявляются или проявляются крайне слабо, сливаясь в одну, даже при очень малых натягах. Следовательно, при тех же параметрах системы резонансы у ротора с двумя упругими опорами гораздо менее энергоемки, чем у ротора с одной упругой опорой. Значительное влияние оказывает и взаимное расположение неуравновешенных масс, т. е. соотношение между статическим и динамическим дисбалансами. Проводились испытания с ротором, имевшим в двух плоскостях коррекции неуравновешенности 0,215 и 0,279 г -см при относительном расположении неуравновешенных масс в 45, О и 180°. В первом случае Таблица 3.9. Снижение критических угловых скоростей в системе с двумя упруго установленными подшипниками суммарная статическая неуравновешенность составила 0,457 г-см, во втором - 0,494 г - см и в третьем - 0,064 г .см. Динамическая неуравновешенность оценивается труднее, однако ясно, что при 0° она минимальная, а при 180° максимальная. Критические угловые скорости для симметричного ротора в двух упругих опорах определяются по формулам [151: (Oi = У2с/М] щ - Ус1/2 {В - Л), (3.171)
где с--жесткость упругой опоры; В - момент инерции ротора вместе с колеблющимися частями опор относительно оси, проходящей через центр тяжести ротора. Расчетные и экспериментальные критические частоты вращения сведены в табл. 3.9. Экспериментальные критические частоты вращения даны в отношении к соответствующим скоростям в линейной системе. Судя по этим данным, отклонение резонансов в сторону низких частот сохраняется и в системе с двумя упругими опорами, однако эти отклонения меньше, чем в системе с одной упругой опорой (для первой критической скорости). Следовательно, система с двумя упругими опорами более линейна в динамическом смысле, чем система с одной упругой опорой. С увеличением жесткости опор отклонение резонансных зон от расчетных, значений увеличивается, что говорит о возрастании степени динамической нелинейности. Увеличение натяга довольно быстро приближает первую критическую зону к расчетной, но натяг почти не влияет на вторую критическую скорость (рис. 3.49). При больших натягах первая и вторая критические скорости сливаются, образуя один максимум амплитуд (рис. 3.50 и 3.51). Максимальные значения резонансных амплитуд убывают с повышением натяга, но резкого уменьшения при каком-либо определенном значении натяга не отмечалось. Это также говорит о том, что в системе с двумя упругими опорами нелинейность подшипника значительно меньше влияет на динамику ротора, чем в системе с одной упругой опорой. Наконец, следует отметить, что взаимное расположение неуравновешенных масс, т. е. соотношение между статическим и динамическим дисбалансами, в значительной степени влияет на амплитуды в зоне первого и второго резонансов. Так, при угле между неуравновешенными массами О? (преобладает статический дисбаланс) преимущественно выделяется первый резонанс, амплитуда второго почти в два раза ниже (рис. 3.50). Если угол между неуравновешенными массами. равен 180° (преобладает динамический дисбаланс), то на переходном процессе выделяется вторая критическая угловая скорость. В этой серии опытов также можно отметить присутствие субгармонических явлений порядка 1/2, принимающих здесь чисто резонансный характер. Амплитуды колебаний на субгармоническом режиме достигают амплитуды на основном резонансе. Расположение этих зон, как следует из анализа полученных осциллограмм, связано с удвоенными критическими скоростями. На рис. 3.50 сравниваются процессы разгона ротора с различным расположением дисбалансов в системе с упругими кольцами 3 (с максимальным коэффициентом жесткости). При преобладающем статическом дисбалансе (угол между неуравновешенными массами 0°) имеем две зоны субгармонических колебаний: при со = l,84cOi и со = 1,80о)2., Изменив угол между неуравновешенными массами на 180°, получили одну субгармоническую зону при ш = 1,75со2. В дальнейших экспериментах с увеличенным натягом при том же угле 180° (рис. 3.51) зона субгармоник располагается на со = 1,80о)2. Субгармонические резонансы имеют место и при меньшей жесткости опор (кольца /, рис. 3.49), располагаясь на со 1,60оз2 Исключение составил выбег системы с натягом Fq = 1,6 кгс, когда зона субгармоник располагалась на о) UOcog. Величина усилия предварительного осевого натяга практически не влияет на положение субгармонического резонанса, но уменьшает амплитуды субгармоник, что можно объяснить увеличением демпфирующих свойств опор. На основании проведенных экспериментов и теоретических соображений, можно составить спектр опасных в резонансном отношении частот для роторов, работающих в упругих подшипниках качения. На рис. 3.52 построен подобный спектр для си- 6 и 18 24 дО 38 42 48 54 л-Ю.об/т Рис. 3.49. Разбег ротора в двух упругих подшипниках с усилием натяга Fq - 1,6 и 4,0 кгс. Зона 1 - первая критическая скорость; зона 2 - субгармонический резонанс порядка 1/2: --Fq = 1,6 кгс;---- Fq = А,0 кгс А.мнм 12
Рис. 3.50. Амплитудно-частотная характеристика для ротора в двух упругих опорах с различным расположением неуравновешенных масс; усилие натяга Fq= 1,2 кгс. Зона 2 - зона субгармонических колебаний порядка 1/2: -- - 0°;----ISC 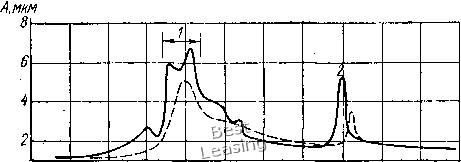 О 12 18 24 30 36 42 48 54 60 л-Ю,о5/мин Рис. 3.51. Разбег ротора в двух упругих опорах с натягом FQ = 2,4 и 5,6 кгс. Зона 1 - зона критической скорости; зона 2 - субгармонический резонанс: --Fo = 2,4 кгс;---- = Ъ, кгС 13 А, С. Кельзон н др. Стёмы с одной (рис. 3.52, й) и двумя (рис. 3.52, б) упругими опбрами. Порядок колебаний по отношению к скорости вращения ротора указан в каждой зоне. Спектр резонансных частот для ротора в двух упругих опорах определяется соотношением между первой и второй критическими угловыми скоростями. Для экспериментального ротора это отношение cOg/coi = 1,42. Частотный спектр на рис, 3.52 построен с учетом этой цифры. Зона субгармоник порядка 1/3 на этом рисунке не выделена, так как во время экспериментов в системе с двумя упругими опорами подобные колебания не возбуждались. о 0,5 1 и 2 2.5 3 3,5 ы/щ о 0,5 1 42 2 2,5 3 5.5 4 Рис. 3.52. Спектр резонансных частот (основных и субгармонических): а - для ротора в одной упругой опоре; б - для ротора в двух упругих опорах Итак, в результате экспериментов на электрошлифовальном шпинделе с упругими опорами можно сделать следующие выводы. 1. Теоретические положения о динамической линеаризации роторной системы с упругими подшипниками качения подтверждаются. Влияние нелинейных свойств подшипника с предварительным осевым натягом тем , меньше, чем ниже жесткость линейного упругого поля опор. 2. Роторная система с двумя упругими опорами линеаризуется в большей степени, чем система с одной упругой и одной шарнирной опорами. 3. Наблюдаемое экспериментально снижение критических угловых скоростей полностью можно отнести за счет нелинейных свойств предварительно натянутого шарикоподшипника, что подтверждается анализом осевых перемещений наружного кольца подшипника и сопрягающихся с ним деталей. 4. Резонансы в системе с двумя упругими опорами значительно менее энергоемки, чем в системе с одной шарнирной опорой. При наличии в системе даже малого естественного демпфирования и отбалансированном роторе критические угловые скорости проходят без значительного увеличения амплитуд колебаний. 5. Подтверждено существование субгармонических колебаний как в системе с жесткими опорами, так и в системе с упругими опорами. В системе с жесткими опорами эти колебания не исче- зают с увеличением частоты вращения ротора и после возникновения распространяются по всей области рабочих частот вращения, переходя из одного вида в другой. 6. В системе с упругими опорами субгармонические колебания имеют ярко выраженный резонансный характер. Верхняя их граница располагается не далее удвоенной критической угловой скорости. 7. Вид и характер субгармонических колебаний порядка 1/2, а также траектория движения центра шипа ротора на субгармоническом режиме, аналогичны тем, что были получены при исследованиях на аналоговой машине и совпадают с теоретическим решением. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 [ 31 ] 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||