

|
|

|
Промышленный лизинг
Методички
Третья теорема подобия: необходимыми и достаточными условиями создания подобия являются пропорциональность сходственных параметров, входящих в условия однозначности, и равенство критериев подобия изучаемого явления. Условия однозначности - это условия, выделяющие из общего класса конкретный процесс или явление. К ним относятся следующие, не зависящие от механизма самого явления факторы и условия: геометрические свойства системы; начальные условия; граничные или краевьш условия. Иными словами, согласно я-теореме, равенства т-4 критериев вполне достаточно для обеспечения подобия процессов. Эта возможность реализуется, когда, задав условия однозначности, мы выделяем из бесконечного множества процессов, которым соответствует данное дифференциальное уравнение, те конкретные процессы, подобие которых необходимо обеспечить. Очевидно, что некоторые условия однозначности находятся в прямой зависимости от цели исследования. Так, например, при исследовании установившихся процессов пропорциональностью начальных условий можно не задаваться. Пример 4.1. Рассмотрим оба способа определения критериев подобия на примере колебательной системы Моу ~\-су = Qsm (Sit, (4.16) /(Мо, Q, (О, у, с, 0=0. (4.17) Матрица размерностей для параметров (4.17) в системе единиц СИ имеет вид (4.18) Рассматривая определители третьего порядка матрицы (4.18), можно выбрать все независимые комбинации величин, определители которых отличны от нуля. Легко убедиться, например, что величины М, с, t зависимы между собой, так как 1 О 1 О О о величины Мо, Q. W Независимы, поскольку 1 О О D= 1 1 -2 0 0-1 (4.19) Для вывода критериев подобия возьмем именно,эту комбинацию, хотя с таким же успехом можно было бы взять любую другую независимую комбинацию. Выразим теперь оставшиеся три величины у, с, t через независимые AIq, Q, со. В качестве примера более подробно остановимся на выражении для у. Пусть у= MqQw. Тогда, в соответствии с (4.12), имеем: - 1, Л2 „ D,y Д где Пгу - определитель, получаемый из (4.19) путем замены его первой строки на строку размерностей у [матрица (4.18)], 0 1 О 1 1 -2 О О -1 Оуу Оу - определители, получающиеся аналогичной заменой второй п третьей строк. Итак, у= MQco". Совершенно аналогично находим: с= MoQO(0 t= AfgQO(o~i. Из полученных соотношений, с учетом (4.13) и (4.14), получим следующие критерии подобия: (4.20) где индекс в скобках указывает номер теоремы, с помощью которой получен критерий. Применив первую теорему подобия к уравнению (4.16), получим следующие критерии подобия: (4.21) Легко проверить, что критерии (4.21) могут быть получены через критерии (4.20), а именно Я11> - Л;2); Л1 = Д2 (Я12)~2; Яг = 3X2112), 2. Подобие и моделирование гибких роторов Постановка задачи, В зависимости от конструкции, колебания системы ротор-опоры могут описываться дифференциальными уравнениями различного вида. Будем называть ротор гибким, если в уравнениях движения учитываются его изгибные колебания, в противном случае - жестким. Ротор и опоры образуют две независимые системы, которые соединяются друг с другом через третью систему - подшипники. Ма оснований положения о подобии сложных систем [24] можно утверждать, что подобие системы в целом будет обеспечено при одновременном подобии независимых подсистем (ротор, опоры) и подсистемы, их соединяющей (подшипники), т. е. при одинаковых масштабах общих сходственных параметров подсистем. Это позволяет рассматривать подобие названных составных систем по отдельности. Под масштабом любого параметра % условимся понимать отношение его модельного значения к натурному, т. е, т = Я/Ян- Впервые вопрос о динамическом подобии валов переменного сечения, по совету академика А. Н. Крылова, был рассмотрен Е. Б. Лунцем [69], который показал невозможность создания модели вала обычным применением теорем о подобии, т. е. путем анализа размерностей физических величин. Действительно, применив к уравнению упругой линии вала (в общепринятых обозначениях) первую теорему подобия, получим критерий подобия . Ely который с учетом размерностей [/] = [d\= IxV; ly\ = Ixh [MJ преобразуется в критерий вида [Gx] - [ухЧ где у - удельный вес материала вала; G - сила тяжести. Из полученного выражения следует, что при = гПу = I должен быть Шх = 1, т. е. размеры модели равны размерам оригинала, и моделирование невозможно. Объясняется это тем, что при = 1 масштаб сил, исходя из размерности £, равен квадрату масштаба длин. С другой стороны, при triy = 1 масштаб сил равен кубу масштаба длин, что несовместимо с предыдущим. Е. Б. Лунц разрешил это противоречие путем применения независимых единиц измерения для длин и диаметров. В результате он нашел оптимальную с точки зрения динамического подобия модель, характеризующуюся соотношениями: tUd = ml - для вала; то = тх, ть = mdm~l - для сплошных дисков. Здесь d п X - диаметры и длины вала; D я L - то же дисков. Подобие роторов с учетом подшипников скольжения было рассмотрено В. Я. Кальменсом [391. Он установил, что для подо-бия подшипников скольжения при = 1 радиальные зазоры б модели и оригинала должны быть одинаковы, а масштаб длины 204 подшипника т (и его диаметра) и масштаб длины вала свя- 1,25 2 заны соотношением /n = тх при md = тх. Учет упругости и массы опор при моделировании гибких роторов произвел М. И. Лаппа [66]. Полученные им критерии подобия для однодискового ротора частично включают критерии, полученные в работе [39]. Однако в перечисленных работах не нашел отражения тот факт, что при соотношении т</ = т углы прогибов сала модели увеличиваются в т- раз, что может существенно повлиять, особенно у достаточно гибких роторов, на динамику смазочного слоя подшипников. Кроме того, в них отсутствуют рекомендации по моделированию таких элементов, как дисков с посадочным отверстием, жестких роторов на упругих опорах, подшипников качения. В связи с этим имеет смысл рассмотреть другие возможные варианты моделей роторов и подшипников. Вывод критериев подобия. Пусть ротор представляет собой вал переменного диаметра, несущий ряд дисков. Введем следующие обозначения: т (х) - погонная масса ротора; а (х) - момент инерции погонной массы дисков относительно оси вращения (моментом инерции вала пренебрегаем); е (х) - кривая дисбалан-, сов; у - комплексный прогиб вала; р (х) тесо - интенсивность сил неуравновешенности ротора. Тогда колебания ротора могут быть описаны комплексным дифференциальным уравнением вида (см. [30], стр. 98* 21(0 дх \ dt р{х)е (4.22) Для более полного описания динамического состояния ротора к уравнению (4.22) следует добавить еще выражения для углов наклона упругой линии вала а и нормальных напряжений о, а именно: а - dy/dx\ о = MjW, (4.23) где - изгибающий момент; W - момент сопротивления сечения. В соответствии с третьей теоремой подобия к уравнениям связи (4.22) и (4.23) необходимо добавить еще условия однозначности. Совершенно очевидно, что в данной задаче выполнение условий однозначности означает сохранение краевых условий, что, в Свою очередь, приводит к подобию сил, действующих со стороны подшипников и опор на ротор. Будем считать, что эти условия выполнены. применив к выражениям (4.22) и (4.23) метод интегральных аналогов, получим следующие критерии подобия: Пх = (i)t; Я2 = EIf/{mx)\ Яд = al{tnx% Я4 = pf/my; ] М2,.., „ ЛУГ,ЛЛ ] (4.24) Я5 = ecofly] = axly; я, = aW/M. Для большего удобства введем в рассмотрение следющие величины: G - силу тяжести; А - момент инерции массы; 7 - удельный вес материала вала; g - ускорение силы тяжести. Тогда, в силу очевидных соотношений между размерностями величин Ш - [со"1]; [/1 - ЫЧ] IG [пг] = [Gg-4-Ч; la] = [ЛхЧ; 1р] = [Gx- IMJ - iGxh iW] - ЫЧ, выражения (4.24) могут быть преобразованы к виду: Я1 = Ш] Яа == Edg/(yxW)] Я3 " Ag/{yd"x)\ Я4 gl{y% = ly\ = xly\ Я7. = odl{yx). (4.25) (4.26) Критерии подобия (4.26) являются исходными при моделировании гибких роторов. Подобие валов. В качестве независимых величин выбираем те, которые можно практически изменять независимо друг от друга при конструировании модели, а именно: £, 7, d, х. Масштабы изменения остальных величин найдем из индикаторов подобия, соответствующих критериям (4.26). Учитывая, что = I, получим ту-= 1/т% ту/тЕГПх/та; Ша = пгу/гпх my!mEtnllml\ гпа mymlltrid. (4.27) Если модельный и натурный валы выполнены из одинакового материала, а именно этот случай является наиболее рациональным, имеем: = 1; /По = mlmx\ = mm ; те = ту т~1т\\ та гп1т1\ -md = tridml. (4.28) Подобие дисков. Поскольку упругие свойства дисков не имеют значения, а важны только их веса и моменты инерции, будем полагать, что материал дисков и вала модели, а также их продольные и поперечные масштабы различны. Тогда из числа независимых величин выпадает модуль упругости Форму натурного и модельного дисков принимаем цилиндрической (рис. 4.1). Пусть Шг - отношение удельных весов модельных и натурных дисков; mxiirua- масштабы их продольных и поперечных пазмеоов, причем т = DiJO, Требуется выразить т;с и через и т, таким образом, чтобы сохранилось подобие весов и моментов инерции дисков. Учитывая, что для дисков: х м) -М» 0н = 4Тн(£»?н-1)Хн, 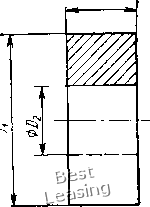 после несложных преобразований получаем triG = -~Q~ = ттшх --pirp Рис. 4.1. Схема где k = DjDiu = dJDi - отношение внутрен- диска него к наружному диаметру натурного диска. Поскольку необходимо, чтобы веса дисков изменялись так же, как и участков вала, имеем (4.29) « ---d mymdtrix = тгх -jZTk Определим условие подобия моментов инерции дисков. Из выражений (4.26) для Яз имеем т-А tuymlml. (4-30) С другой стороны, учитывая, что Aj.X{D\~d% имеем (4.31) Из выражений (4.30) и (4.31) получаем следующее уравнение: (4.32) Решая совместно уравнения (4.29) и (4.32), окончательно находим: (4 33) «D - тУ 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 [ 33 ] 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |