

|
|

|
Промышленный лизинг
Методички
в случае диска без посадочного отверстия {k = 0) получаем: т т\ л» что совпадает с результатами работы [69!. Теперь рассмотрим случай, когда натурный диск не является цилиндрическим, но известны его вес G„ и момент инерции Л„. Модельный диск предполагается цилиндрическим с известными внутренним диаметром и удельным весом 7. Требуется найти наружный диаметр модельного диска D и его ширину Х. - Для сохранения подобия требуется, чтобы выполнялись Следующие соотношения: 7м (1м - м) м == mytnlmxGyC, -щ- (Dim - du) Хм = myinlmlA, из которых находим: AM=]/8gm--d; (4.34) Как следует из формул (4.33) и (4.34), вид материала, из которого выполнены модельные диски, влияет только на их ширину. Для того чтобы диски не получились слишком тонкими, их нужно выполнять из более легкого материала. Подобие упруго-массовых опор. Пусть опора имеет массу Мо и жесткость с. Со стороны ротора на опору действует гармоническая возмущающая сила с амплитудой Q. Тогда уравнение движения опоры имеет вид ЛоУ + = Q sin (dt. Критерии подобия данной колебательной системы получены в примере 4.1. Для большего удобства представим их в виде: X = (0; Я2 = i/MoCoVQ; Яз = clMcd = pVco, (4.35) где р - частота свободных колебаний опоры. Критерии (4.35) дают следующие масштабные соотношения: trie = тмт%\ Шу = mQl{mMrn%), Исходя из требования равенства масштабов сил, действующих в системе «ротор» и в системе «опоры», и учитывая формулы (4.27), получаем Щ~ trtyrndtrix] гпс = гпЕпгЬ/т. (4.36) Сравнение вариантов модели. Исходным пунктом расчета параметров модели системы ротор-опоры является задание либо масштаба веса т, либо масштаба длины вала т.. Затем, варьируя соотношения между масштабами и т, можно получить большое количество вариантов модели, однако не все они имеют одинаковую практическую ценность. Из масштабных соотношений (4.28) следует, что ограничением в сторону увеличения отношения mjmx является увеличение масштаба скоростей т, а в сторону уменьшения этого отношения - увеличение масштаба напряжений т. В качестве иллюстрации этого в табл. 4.1 приведены три возможных рарианта модели системы ротор-опоры. Модель 1 - геометрически подобная (т == Шх). Большим ее недостатком является увеличение угловой скорости в раз, а также малое снижение жесткости опор. Наиболее интересной с точки зрения динамического подобия является модель 3 {md= nil), у которой сохраняются абсолютные натурные значения скоростей, прогибов, дисбалансов и нормальных напряжений. Ее недостаток - увеличение углов наклона упругой линии вала в mj раз, что иногда является нежелательным при испытании модели на подшипниках скольжения. Сохранение углов наклона выполняется на модели 2 (т = - т), но это происходит за счет увеличения скорости в т-** раз. Выбор оптимального варианта модели в конечно! счете определяется целью и характером испытаний, а также возможностями испытательного стенда. Следует отметить, что изложенная методика перехода от натурного ротора к модели применима также при расчетах динамики роторов на ЭВМ. Так, при расчетах крупных реальных роторов возможно переполнение порядков ячеек, что приводит к автоматической остановке ЭВМ. В связи с этим целесообразно осуществлять переход к модели, у которой диаметр начального участка равен 1 см. Переход к модели и обратно осуществляется по приведенным выше формулам и позволяет производить расчеты роторов любого размера. 14 д. с. Кельзон и др . 209 Таблица 4.1. Масштабы параметров вариантов моделей системы ротор-опоры Параметры Обозначение Исходные формулы Модель 1 (т = т) Модель 2 (т ~ i) Модель 3 (т - т) Материал натурного н модельного валов неодинаковый одинаковый неодинаковый одинаковый неодинаковый одинаковый Сила Угловая скорость тх г т. 1 "I/ 1ПЕ mv Щ Дисбалансы Прогибы у X ту 2 friy ту тв Углы наклона упругой линии вала ту т\ тв 1 т. тх тв Нормальные напр яжения гпхт  VrnxTtiy -Т1вйеречные-размеры Y 1 u.k{\mx) Продольные размеры mymmxil - k) ~2тУ] ml jl-k) ту \Jk(\ - 2mx) mr Коэффициенты жесткости тхтв пример 4.2. Пусть йатурный ротбр, йзображейный на рис. 4.2, иМеет следующие исходные данные (табл. 4.2). Требуется рассчитать модель ротора при /По) = 1, то= 0,01 и одинаковом материале натурного и модельного валов. Диски предполагается выполнить нз дюралюминия (y=2,710 кгс/см), поэтому т-р = у /у = 0,346. © © Рис. 4.2. Схема натурного ротора Таблица 4.2. Исходные данные натурного ротора
в соответствии с табл. 4.1, данному случаю (/Пщ ~ 1) отвечает модель ротора 5, имеющая = т. Дальнейший расчет производим с помощью этой же таблицы: масштаб длины вала m.v" у/Иго = yOyOl ~ 0,398; масштаб диаметров вала т=== т - 0,158; масштаб поперечных размеров первого диска rUj = ; + 21 - m) = 0,418; масштаб продольных размеров первого диска тх = [1 +21 - 2т2)] тр -0,147; опор т= 0,01. Масштабы размеров второго диска: ~ 0,414; 0,156; масштаб жесткости Параметры Модельного ротора, вычйсЛеннке умножением параметров йатур-ного ротора на соответствующие масштабные коэффициенты, сведены в табл. 4.3. Таблица 4.3. Параметры модельного ротора
3. Подобие и моделирование жестких роторов в упругих опорах Как было отмечено выше, одним из эффективных способов снижения вибронагрузок является установка роторов в упругих опорах. В тех случаях, когда жесткости опор в несколько раз меньше изгибной жесткости ротора, упругими деформациями ротора можно пренебречь и рассматривать его как абсолютно твердое тело, имеюш,ее четыре степени свободы. Для вывода критериев подобия рассмотрим жесткий двухопорный ротор, имею-и;ий массу Л4, осевой момент инерции А и экваториальный момент инерции В относительно осей, проходяш,йх через центр тяжести ротора С. Ротор опирается на две безмассовые упругие опоры с коэффициентами жесткости и Центр тяжести ротора расположен на расстоянии 1 от левой опоры; расстояние между опорами / (рис. 4.3). 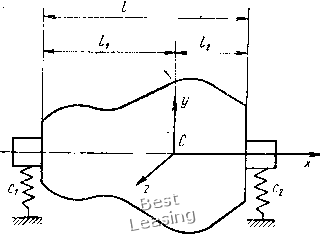 Рис. 4.3. Схема жесткого ротора в упругих опорах 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 [ 34 ] 35 36 37 38 39 40 41 42 43 44 45 46 47 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||