

|
|

|
Промышленный лизинг
Методички
Дифференциальные уравнения движения ротора под действием статической и динамической неуравновешепностей имеют вид (3.102). Выбрав в качестве независимых величин М, /, со и применив к уравнениям (3.102) я-теорему, получим следующие критерии подобия: б; е; со, IJl; у11\ zll\ ell\ (4.37) /(iWco), AI{Ml% BI{Ml). (4.38) Перечисленные критерии, с учетом очевидного равенства = triQ, где G - вес ротора, дают следующие масштабные соотношения: /Пб = те = 1; mt у тот%\ тА= гпв твгп]. (4.39) Исходя из требований простоты изготовления модели и удобства ее испытаний будем полагать, что модельный ротор выполнен из цельного куска. Поскольку упругие свойства ротора здесь не играют роли, модель можно выполнить из другого материала. Способ определения характеристик модели зависит от конструкции натурного ротора. Положим, что ротор образован вращением некоторой весомой с заданным распределением плотности фигуры вокруг оси X, лежащей в ее плоскости и не пересекающей ее. Условимся называть ротор сплошным, если его фигура вращения сплошная и нижняя граница ее совпадает с осью X. При несоблюдении хотя бы одного из этих условий ротор будет несплошным. Кроме того, если фигура вращения имеет постоянную плотность по всей площади, то ротор будет однородным, при переменной плотности - неоднородным. В соответствии с приведенной классификацией модель во всех случаях будет сплошным однородным ротором. Нетрудно убедиться, что для сплошных однородных роторов произвольной формы модельный ротор геометрически подобен натурному. Это положение вытекает из рассмотрения выражений для весов и моментов инерции натурного и модельного роторов с условием выполнения соотношения (4.39) для т и т. Если фигура вращения натурного ротора несплошная или неоднородная (рис. 4.4, а), определение формы вращения модели варьированием масштабов длины и радиусов неосуществимо. В самом общем виде задача состоит в следующем. Пусть известны Gh» Лн, Бн» » 1 натурного ротора. При заданных масштабах та, mi и известной плотности материала модели, можно определить Си, Ли, 5м> и h модельного ротора. Требуется найтиакую форму вращения у = у (х) (рис. 4.4, б), чтобы соответствующий ей ротор обладал перечисленными параметрами. Для удобства введем системы координат Оху и OXY, имеющие начало на левом конце оси симметрии роторов. Из перечисленных параметров в новых системах координат претерпят изменение только экваториальные моменты инерции 5 и В, новые значения которых легко определяются по формуле Штейнера. Нетрудно убедиться, что если модельный ротор подобен натурному, то подобие сохраняется и в новых системах координат. В дальнейшем под 5н и В будем понимать экваториальные моменты инерции относительно осей 0Y и Оу соответственно. 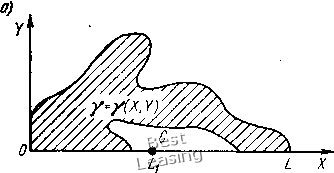 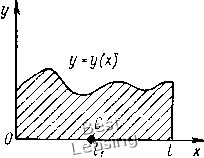 Рис. 4.4. Фигуры вращения: а - несплошиого натурного ротора, имеющего переменную плотность; б - модельного ротора Выражения для параметров модели mo>Rho записать в виде: Gm = Уи j dx; А о уп уЫх; В I I -J ydX\ ix dx 0 0 л • (4.40) Кроме того, требование расположения центра тяжести модели на расстоянии l- от начала координат дает следующее соотношение: /i г/ dx о ху dx. (4.41) Основной задачей является определение такой функции у = === у (х) чтобы она удовлетворяла соотношениям (4.40) и (4.41). С целью упрощения вычислений будем искать решение не для самой функции у (х), а для ее квадрата, т. е. для функции ф (х) = - У (х). Введем безразмерную координату z = хН, С учетом обозначений: Zo = hlh ос = Gj{nyJ)\ р = 2Agl{nyJ)\ у = Bgl(nyJ)\ Г) = (y - 0,2Щ/Р (4,42) 215 исходные соотношения (4.40) и (4.41) сводятся к системе из трех интегральных условий: 1 1 I Ф (г) dz = а; J (z) Й2 = р; J гф (г) dz = r] (4.43) и условию, выражающему ортогональность искомой функции ф (г) и двучлена Zq-z на промежутке (0; 1) (го - 2) ф (z) dz 0. (4.44) Ищем решение в виде линейной комбинации трех линейно независимых взаимно ортогональных на промежутке (0; 1) многочленов а) (г) (i = 1, 2, 3) Ф (2) = lOpi + ЯаФз + ЯзОрз, (4.45) = «о + 1у "Фз = &о + biZ + bz] (4.-46) CiZ ~h" 3 - czy Xi - неизвестные постоянные. Условие взаимной ортогональности многочленов имеет вид 111 ifilg dz= j ifi\f3 dz = \32i.3 dz~Q. (4.47) Подстановка функции (4.45) в выражения (4.44) и (4.47) приводит к системе алгебраических уравнений относительно коэффициентов ао, а, Ьо» <з* [ Zq 2 -3-1=0; 2 3 го 1 ) + *"(-)=о; го 1 Н 2 3 4 5 2\ 3 (H-f) + 6,(l+f)+*.(l+i)=0; (4.48) Решение системы (4.48) при 0 = 0 = 0 = приводит многочлены (4.46) к виду: 1{)з = 1 - 122 + 302 202, 3(22о~1)/(2-32о). (4.49) (4.50) Система уравнений (4.43) после подстановки в нее выражения (4.45) для ф (2) с учетом (4.49) имеет следующее решение относительно неизвестных постоянных Я: %х = 2а (2 - 32о); Яа = 301 - 5а (б2о - I); Яз = ]/7 Гр - 4а (32 320 + 1) - у Ц (4.51) Итак, при известных Я,- и ор выражение для радиуса модели имеет вид - у {г) 2"* h ЯзФз- (4.52) Возможность построения модели при наперед заданных масштабах то и mi определяется знаком подкоренных выражений Яз и у (2). Вполне очевидно, что эта возможность реализуется лишь для определенных соотношений масштабов то и /П/, определение которых и является искомой задачей. С этой целью потребуем одновременного равенства нулю Яа и Яд, что означает выполнение следующих соотношений: б11 = а (б2о - I), р - 4а (32g - З20 + 1). (4.53) Решив выражение (4.53) с учетом (4.42) и (4.39) относительно длины модели / и приравняв правые части, получим выражение для масштаба длины т* = f (те), при котором Яа Яз = 0: <(Ч- 1)(?о-32о+ОИ (4.54) гпиЛ1 (2Sh - н) Выражение для радиуса модели, в этом случае имеет вид f (2) V 2а [32 (22о-1) + (2 -32~;)]- (4-55) Очевидно, что соотношения (4.54) и (4.55) справедливы не при любом расположении центра тяжести ротора, а лишь при 1/6 < 2о < 2/3. Модельный ротор имеет цилиндрическую форму при mi mi и 2о = 0,5, т. е. при расположении центра тяжести ротора посередине, при этом выражения (4.54) и (4.55) имеют вид: у* (z) = Ka. (4.56) (4.57) 217 юверим Достоверность выражения (4.54) на примере пустотелого цилиндрического ротора с внутренним радиусом наружным Ri и длиной L. Модель такого ротора может быть рассчитана непосредственно из анализа формул параметров роторов. Выражение масштаба его длины с учетом обозначения k = RjRi имеет вид (4.58) Подставив в формулу (4.54) выражения параметров G, Л„, fijj для данного ротора с учетом, что Zq = 0,5, после соответствующих преобразований приходим к соотношению (4.58), что и требовалось доказать. Таким образом, конструирование модели при известных параметрах натурной роторной системы начинается с назначения либо масштаба веса, либо масштаба длин и материала модели. Расчет формы модели производится с помощью выражений (4.54) и (4.55). Масштаб угловой скорости и частот колебаний выбирается в зависимости от возможностей испытательного стенда. Очевидно, что наиболее рациональным вариантом является т = 1. В соответствии с соотношениями (4.39) масштаб коэффициентов жесткости упругих опор при известных niQ и т определяется по формуле trie = гпогп, а масштаб эксцентриситета центра тяжести ротора равен масштабу длин, т. е. гПе - т. Тогда при равенстве у модельного и натурного роторов углов б и е, характеризующих динамическую неуравновешенность, масштабы амплитуд колебаний центров опор Oi и 0 будут равны масштабу длины, т. е. Пример 4.3. Ротор центрифуги, имеющей L ~ 150 см; Gh = 107 кгс; Лц = = 41,14 кгс-с-см; Вп~ 630,6 кгс-с-см; - 0,415, установлен в двух упругих опорах жесткостью Сн - 2000 кгс/см. Требуется рассчитать динамическую модель центрифуги для то = 0,1 и ~ 2,7-10" кгс/см (дюралюминий). По формуле (4.54) находим = 0,23, откуда имеем: /= 34,5 см; Ом = - 10,7 кгс; Лм - 0,22 кгс-с-см; = 3,33 кгс-с-см. В соответствии с (4.55) находим выражение для радиуса модели: у* (2) = /55.16 - 37.162 у* (х) /55,16- 1,08х. Для удобства изготовления модели функция у* (х) аппроксимировалась двумя прямыми: 1* (л) 7,43 - 0,08л: при 0x17,25; У* (х) = 7,85 - 0,10л: при 17,25 < л: 34,5. По формулам (4.40) и (4.41) для аппроксимированной функции у* (х) были найдены следующие значения параметров модели: = 10,6 кгс; Лм ~ 218- = 0,212 кгс-с-см; 5„ = 3,27 кгс-с-см. Сравнение полученных величин с ранее найденными из условий подобия показывает, что максимальная погрешность, вносимая аппроксимацией, составляет 2%, что вполне допустимо. Для масштаба угловых скоростей == 1 в соответствии с формулой (4.39) коэффициент жесткости упругих опор См = 200 кгс/см. 4. Подобие и моделирование подшипниковых узлов Как отмечалось выше, масляная пленка подшипников скольжения при определенных условиях может быть причиной интенсивных автоколебаний роторов. Несмотря на большое количество работ, посвященных исследованию этого явления, в научной литературе до сих пор отсутствует единое мнение о количественной оценке некоторых важных его- сторон [79]. В связи с этим метод физического моделирования может оказаться полезным как при экспериментальном исследовании масляных вибраций, так и при изучении динамики проектируемых роторных систем, имеющих подшипники скольжения. Динамика роторов с учетом упругих и демпфирующих свойств подшипников качения даже в простейшем случае вертикального ненагруженного вала описывается сложной системой нелинейных дифференциальных уравнений [82]. Исследование динамики реальных горизонтальных роторов еще более усложняется, поскольку упругое поле нагруженного статической нагрузкой подшипника качения обладает круговой нелинейной анизотропией. В связи с этим представляет интерес изучение колебаний роторов в подшипниках качения на моделях. Подобие подшипников скольжения. Как показано М. В. Ко-ровчинским [62], полное подобие подшипников скольжения будет иметь место при обеспечении следующих частных видов подобия: геометрического, кинематического, динамического, теплового, а также подобия нормальных и касательныхусилий в масляном слое. Однако практически достичь полного подобия нельзя, так как не все критерии, даже необходимые, могут быть реализованы в процессе моделирования. В связи с этим будем рассматривать динамическое подобие подшипников, характеризующееся подобием сил, действующих со стороны масляного слоя на цапфу и оказывающих влияние на динамику ротора. Тепловоа подобие при этом будем рассматривать лишь сточки зрения влияния температуры масла н его вязкость. Критерии динамического подобия подшипников скольжения получим из дифференциальных уравнений возмущенного движения цапфы на смазочном слое, которые имеют вид: Ml Мц 2Р = Месо cos (ot] 2Ру =Мео} sin 0), (4.59) где М - масса ротора; е - эксцентриситет центра масс ротора; 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 [ 35 ] 36 37 38 39 40 41 42 43 44 45 46 47 |