

|
|

|
Промышленный лизинг
Методички
Так как вал вращается с внутренним упругим кольцом как одно целое, то вектор статической и динамической неуравновешенностей сохраняет по отношению к упругому кольцу неизменное положение. Вследствие этого деформация упругого кольца является статической, а не циклической, как в тех подшипниках, где упругое поле неподвижно. Однако, как показано в работе [46], вращающееся упругое поле влияет на динамику вращающегося 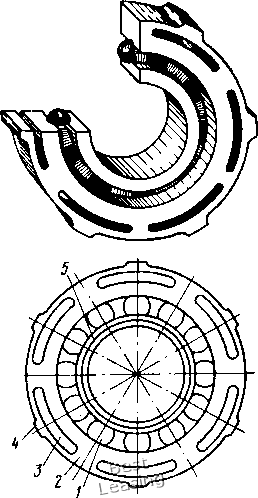 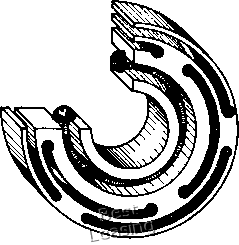 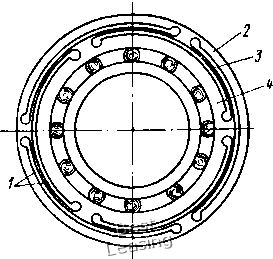 Рис. 5.33. Упругий подшипник каче- Рис. 5.34. Упругий подшипник качения ния с пазами в шахматном порядке вала аналогично внутреннему трению. Это легко объяснимо, так как в обоих случаях имеет место действие силы, вращающейся вместе с валом. Внутреннее кольцо подшипника выполнено цельным и состоит из пяти последовательных концентричных колец 2-5. Кольца соединены между собой перемычками, расположенными в шахматном порядке. Два крайних кольца 2 я 3 посажены на вал и могут вместе с ним перемещаться в осевом и радиальном направлениях. Вибрации, возникающие при вращении вала, воспринимаются промежуточными кольцами 1 являющимися вместе с перемычками упругой связью между средним кольцом 5, выполненным с дорожкой качения, и кольцами 2 и 5, Промежуточные кольца имеют жесткость на порядок ниже остальных, и поэтому определяют как радиальную, так и осевую жесткость всего подшипникового узла. Радиальная и осевая жесткости подшипника могут при этом легко изменяться независимо друг от друга путем изменения размеров промежуточных упругих колец 1 я4 как по радиусу, так и по оси. На рис. 5.36 показан т р е х -колечный подшипник каченияотличающийся тем, что тела качения расположены 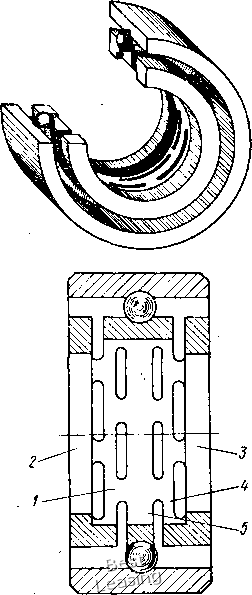 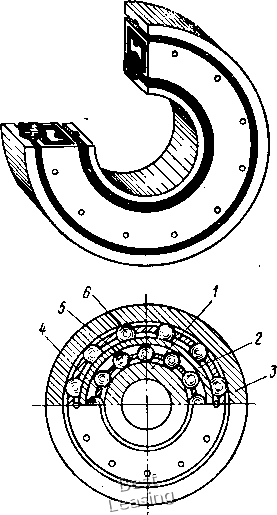 Рис. 5.35. Двурядный подшипник качения с промежуточным упругим кольцом Рис. 5.36. Подшипник качения с внутренним упругим кольцом в шахматном порядке, а сепараторы жестко, соединены между собой. Подшипник содержит внутреннее 1 и наружное 3 кольца, между которыми расположены два ряда тел качения - внутренний 5 и наружный 6у разделенные промежуточным кольцом 2 и заключенные в общий сепаратор 4. Гнезда в сепараторе под тела качения расположены в шахматном порядке. При вращении вала такое расположение тел качения остается фиксированным. В результате между двумя соседними телами качения каждого ряда Авт. свид. № 288459. образуется участок промежуточного кольца, представляющий собой упругую балку, жесткость которой при малых прогибах линейна и может быть рассчитана по известным формулам сопротивления материалов. Наружные и внутренние ряды тел качения вращаются с одинаковой переносной угловой скоростью в сторону, противоположную направлению вращения вала. При этом окружная скорость тел качения наружного ряда уменьшается по сравнению с двухколенным подшипником в 1,5 раза. Для серийного выпуска упругих подшипников качения необходимо решить две задачи: во-первых, надо определить оптимальный коэффициент жесткости для каждого подшипника серии в зависимости от внутреннего диаметра и, во-вторых, разработать технологию, позволяющую получить большую твердость для дорожки качения и одновременно меньшую твердость для упругих элементов кольца. Обе эти задачи несомненно будут решены в ближайшее время. 6. Порядок расчета роторной машины Динамический расчет роторов на стадии проеТтирова-ния роторных машин сводится к получению следующей инфор--мации: а) расположение критических скоростей; б) амплитуд колебаний ротора и опор; в) динамических нагрузок в опорах и напряжений в роторе; г) давлений на фундамент (или корпус машины); д) реакций на внешние возмущения. Для получения этой информации должен быть привлечен весь арсенал современных средств исследования и расчета. Первой стадией расчета является выбор математической модели, описывающей динамику исследуемого ротора. При этом важно из всего многообразия факторов, действующих на ротор, выбрать наиболее существенные, чтобы получить обозримые результаты. С другой стороны, если раньше роторные системы описывались линейными дифференциальными уравнениями и даже при этом упрощенном математическом подходе многие факторы отбрасывались, то в настоящее время предпочтительно вводить в рассмотрение все, что существенно влияет на динамику роторной машины, и не избегать искусственно нелинейностей, если они существенны. Так, например, внутреннее трение в материале ротора играет существенную роль для сравнительно тонких и длинных роторов, у которых оно может являться причиной потери устойчивости в закритической зоне. Для роторов большего диаметра (или меньшей длины) можно заведомо пренебречь влиянием внутреннего трения, так как оно не проявится в зоне частот вращения ротора. Вся информация, которая должна быть получена из расчета, определяет виброактивность роторов. Измеряется виброактив-270 ность динамическими нагрузками на опоры, а они непосредственно зависят от амплитуд колебаний. Для снижения виброактивности, как было показано выше, есть два пути: а) уменьшение абсолютных, значений факторов, являющихся причинами виброактивности, т. е. повышение точности изготовления, балансировки и монтажа; б) применение специальных конструктивных мероприятий - изменение размеров ротора, применение подшипников скольжения нецилиндрической формы, использование Тех нияесное задание СХЕМА 1 Хорантеристана ротора I ->] Выбор нонструниии 0УО£В- ->) РатерЫ, бес, моменты инериии ротора Жесткость ротора Выдортипов радиального и радиально-упорнс&оподшипнино8 \ Определение размероб псдшипниноб ас-(одя cmauugHapHui/. услобиы - * Выбор и расчет упругих опор В ыииспени е иритиче с них С<оростеи Построение амппигтдно-тстотйой хараитедистини Исследобание устойчивости системы ротор- подшипииии ynpysue опоры Определение остаточной статической и динат>есной неурабнобешенностей. Допуски на 5апансиро6ку упругих опор. Следует отметить, что первый путь на современных заводах высокой технической культуры практически исчерпан. Дальнейшее повышение точности приводит к значительному увеличению стоимости без существенных сдвигов в СТОг рону уменьшения виброактивности. Приведем схему последовательного динамического расчета роторной машины (схема 1). Исходными данными являются распределения масс и жесткости ротора, зависящие от его размеров, насаженных на вал деталей и выбранного материала. Вторыми исходными данными являются подшипники, их жесткостные, демпфирующие свойства и динамические характеристики. В некоторых случаях в расчет необходимо вводить и корпус машины или фундамент. Примером такой роторной системы являются судовые и авиационные турбины, устанавливаемые в корпусе судна или самолета, жесткость которого соизмерима с жесткостью подшипниковых опор-и самого ротора. Заметим, что в недалеком прошлом при проектировании судовых турбин податливость корпуса не учитывалась. Ошибки в определении критических скоростей, вызванные этим обстоятельством, а также пренебрежением податливостью подшипников скольже- L - Д и на ми чесни е нагрузка на под иа и пни ни Ь-*-- Лимдмичесиие нагрузки на корпусMaujUHbi Определеные напряжений в упругих Опорах, в роторе, S подшипниках Йсследоёание влияния злектроггагнитных.азродииамиаескик сил, теппобых фантороб. бидроанустичесние расчеты On та ми за и ия си стемы ротор - подиаипнини • упругие опоры - фундамент Окон ча тельный вариант СХЕМА 2 Техническое задание Нонструниия роторной ташииы 6 fiecrriKux опорах Определе»ае амплитуд колебаний и даиамичесних. реаииии подшипников при тестних. опорах f->j Выбор и расчет упругих опор I-H Вычисление критических скоростей \Построеиие амплитудно-частотной характера с тин и ротор- НИЯ, достигали 100%, критические скорости оказывались в действительности в ряде случаев в два раза ниже расчетных. Таким образом, роторы этих судовых турбин вращались при номинальной скорости значительно выше первой критической скорости, хотя существующими Правилами Морского Регистра СССР это запрещено. Однако самым неожиданным оказалось то, что эти турбины эксплуатировались без каких-либо аварий в течение длительного времени. Это объясняется тем, что податливость корпуса и подшипников скольжения значительно снижала жесткость системы ротор-подшипники-фундамент, благодаря чему резонансные амплитуды уменьшались до величин, позволявших осуществить многократный переход через критическую скорость и не препятствующих вращению вала в зоне критической скорости. В практике конструирования роторных машин часто приходится встречаться с необходимостью улучшить динамику уже спроектированной или даже изготовленной машины. В этих случаях процесс расчета несколько изменяется . Схема такого расчета приведена в схеме 2. Итогом расчета должно быть сопоставление параметров виброактивности при старом и новом вариантах конструкции машины. Как и в случае проектирования новой машины (см. схему 1), расчет заканчивается оптимизацией системы ротор-подшипники- упругие опоры-фундамент. Что же следует понимать под оптимизацией такой системы? Оптимизировать можно различные факторы. Так, в практике встречаются случаи, когда наиболее важным является уменьшение динамических нагрузок, передаваемых на корпус машины или на фундамент. В этом случае можно минимизировать сумму квадратов реакций опор. Для многоопорного вала процесс минимизации заключается обычно в подборе податливостей опор, минимизирующих указанную сумму. Поиск осуществляется на ЭВМ. Исследование устойчивости системы подшипнини- упругие олош •-•*\ Линатические нагрузки на т)дшипни1<.и I-< Динамические нагрузки но корпус мошинь Определение напряжений 6 упругих опорах Исспедобание влияния электромагнитных,азродинатческих сил, тепловых (рактороВ, 8и5роанустичесние ракеты Оптимизаиия системы ротор - подшипники упругие опоры - фундамент Окон-, отельный вариант ♦ Можно решать задачу о повышении ресурса подшипниковых узлов при неизменной рабочей частоте вращения или задачу о сохранении достигнутого ранее ресурса подшипников при одновременном увеличении рабочей частоты вращения. Это достигается, как правило, переходом от жесткой установки подшипников к упругой при одновременном поиске их оптимальной податливости. В некоторых случаях в качестве фактора, подлежащего оптимизации, выбираетсямасса и габариты роторной машины. Такого рода задачи обычно приходится решать конструкторам авиационных газотурбинных двигателей. При заданной мощности двигателя задача сводится к резкому увеличению рабочей скорости всех роторных машин, входящих в состав двигателя. Газотурбинный двигатель, состоящий из компрессора, турбины компрессора и свободной турбины (см. гл. 3) при весе ротора компрессора 7 кгс развивал мощность 350 л. с. Для этого пришлось увеличить частоту вращения свободной турбины до 25 ООО об/мин, а компрессор и турбина компрессора имели зону рабочих скоростей 25 ООО-45 ООО об/мин. Естественно, что с увеличением частоты вращения уменьшается ресурс машины. Помимо технических аспектов оптимизации роторных машин, часто существенными факторами, подлежащими оптимизации, являются стоимость машины, ее рентабельность и другие экономические показатели. При расчете роторных систем могут быть исподьзованы некоторые динамические критерии: 1) амплитудный критерий, учитывающий амплитуды колебаний t-й массы на участке частот щ < (о < со] 2) силовой критерий, характеризующий усилия, действующие на звено (i, i + 1) машины; в рассматриваемом случае, например, - на подшипник; лЗ) частотный критерий для регулирования спектра собственных частот системы. Эти динамические критерии приводятся здесь как примерные. Очевидно, что в каждом конкретном случае должен быть выбран один или несколько динамических критериев. Для роторных машин принято устанавливать допуски на остаточный дисбаланс и на амплитуды колебаний. Следует отметить, что оба эти показателя не противоречат друг другу и должны применяться совместно. На стадии проектирования, изготовления и балансировки роторной машины превалирующее значение имеют допуски на остаточный дисбаланс. При испытаниях опытных образцов машины и контроле при ее эксплуатации существенное значение приобретают допуски на амплитуды колебаний. Этот кон-> троль при длительной эксплуатации особенно нажен, так как отлично отбалансированная машины с течением времени может разбалансироваться: из-за смещения деталей под дейсием цен- 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 [ 44 ] 45 46 47 |