

|
|

|
Промышленный лизинг
Методички
Результаты расчетов показывают, что динамические нагрузки на подшипник, вызванные овальностью цапфы, растут с уменьшением эксцентриситета х и уменьшением относительной длины IID, Отношение большой полуоси эллипса нагрузки к малой растет с увеличением х и находится в пределах 3-10. Эллипсы преимущественно ориентированы большой полуосью в направлении статической нагрузки Q. " При проектировании подшипника нагрузка на опору Q, частота вращения цапфы со и диаметр D считаются известными из
0,2 0,4 Ofi 0,8 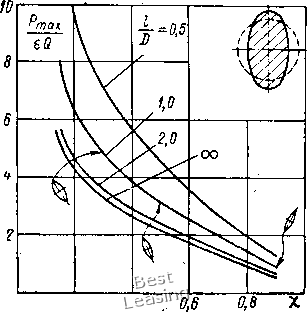 Рис. 1.15. Коэффициент нагруженности полного подшипника (по данным М. В. Коровчинского [62]) 0,2 0,4 Рис. 1.16. Динамические нагрузки на полный подшипник, вызванные овальностью цапфы расчета вала. Для обеспечения минимальной толщины смазочного слоя, при которой подшипник работает в режиме жидкостного трения, при расчетах обычно варьируют три величины: относительный зазор г);, относительную длину IID и вязкость масла д, [62]. Из характера кривых на рис. 1.16 следует, что для снижения вибронагрузок, вызванных овальностью цапф, необходимо стремиться к увеличению эксцентриситета х и длины IID. Эксцентриситет X полезно увеличивать за счет увеличения зазора о)?, так как при этом одновременно уменьшается относительная некруглость цапфы 8. Покажем это на примере. Пример 1,2, Пусть в первом варианте подшипник имеет: Di ~ 150 мм; Rx = 75 мм; ( D)i = 0,5; 1 = 75 мм; = MO; = iR = 0,075 мм; Xi = 0,6. Из графика на рис. 1.15 находим = 0,35. Разницу между максимальным и минимальным значениями диаметра цапфы примем равной Dmax - Dcnin ~ 0,01 мм. Считая, что некруглость цапфы содержит только вторую гармонику, т. е. является овальностью, находим ее амплитуду: Гз = (£>тах - 6min)/4 = 0,0025 мм. Относительная некруглость цапфы составляет: 8i =/-g/i = 0,033. Из графика на рис. 1.16 находим: Ртах = 8i3,6 = 0,12, или 12% от статической нагрузки, 34 что превышает в некоторых случаях допустимый уровень динамических нагрузок на подшипник. Во втором варианте при той же овальности цапфы увеличим относительную длину подшипника и радиальный зазор с сохранением прежнего относительного эксцентриситета и вязкости масла. Параметры подшипника будут при этом следующими: Da = 150 мм; R = 75 мм; 1/D = 1,0; /д = 150 мм; 1.2. Для сохранения эксцентриситета Хг ~ Xi = 0,6 необходимо выполнение равенства При \i2 = fi-i находим:-фа = 16,8 2,6* 10";63 = 0,195мм;82 = Га/ба == 0,0128; Ртах = 822,5 = 0,032, или 3,2% от статической нагрузки. Таким образом, во втором варианте подшипника при той же величине овальности цапфы уровень вибронагрузок в 3,75 раза меньше, чем в первом. Основная доля снижения уровня нагрузок (в 2,58 раза) получена при этом за счет уменьшения относительной некругло«ти цапфы 8 вследствие увеличения радиального зазора. 4. Влияние несоосностей роторов на их виброактивность Вибрационное состояние агрегата, состоящего из нескольких роторньюс машин, во многом определяется точностью выполнения монтажных операций по соединению роторов. Правильность соединения проверяется и нормируется по расхождениям кромок полумуфт перед затяжкой соединительных болтов, характеризующих расцентровку роторов (рис. 1.17, а, б). В зависимости от направления смещения различают два вида расцентровок: а) радиальную (осевую), характеризующуюся радиальным смещением осей р; б) торцовую (угловую), характеризующуюся углом раскрытия полумуфт ф= = {a-b)/D, Если величину а- Ь выра- 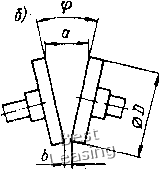 Рис. 1.17. Виды расцентровок роторов перед соединением полумуфт: а - радиальная (осевая); б - торцовая (угловая) зить в мм, а Z) - в м, то получится наиболее распространенная в практике единица измерения излома осей - мм/м. Как видно из табл. 1.1, в настоящее время в литературе нет единого мнения по вопросу норм допусков на расцентровки. Объясняется это главным образом тем, что р и ф, замеренные перед соединением полумуфт (термин - расцентровка), лишь косвенно показывают вероятное динамическое состояние агрегата, так как последнее зависит от того, какими будут р и ф после соединения полумуфт (термин-несоосность). Очевидно, что отсутствие расцентровок является необходимой предпосылкой отсутствия несоосностей, но недостаточной. Об 3* 35 этом свидетельствует хотя бы тот факт, что у некоторых турбоагрегатов, имевших в процессе эксплуатации удовлетворительное вибрационное состояние, после разъединения полумуфт при ремонте фиксировались расцентровки, в несколькораз превышающие допустимые по техническим условиям на монтаж. В то же время в практике монтажа турбоагрегатов встречаются случаи, когда даже после тщательной центровки по полумуфтам устранение биений роторов достигается много-Таблица 1.1. Монтажные допуски иа кратными затяжками и центровку ротонов турбоагрегатов по псвпбпжттряиями бпптпн полумуфтам при п = 3000 об/мин по освооождениями оолтов данным различных авторов ПОЛумуфт. Одним из первых на данное обстоятельство обратил внимание С. Я- Куриц [64]. Он пришел к выводу, что для спокойной работы агрегата необходимо, чтобы оси его роторов, а не оси подшипников, были отцентрированы с максимальной точностью. Справедливость этого вывода в случае использования жесткой муфты оче-в идна: даже небол ьшая несоосность роторов приводит к значительным динамическим нагрузкам на подшипники. При соосности же роторов смещения опор вызовут лишь перераспределение статических нагрузок на подшипники. В случае использования гибкой муфты смещения опор кроме дополнительных статических нагрузок неизбежно вызовут и появление несоосностей роторов. Следует отметить, что в большинстве работ по прочностным расчетам роторных машин рассматриваются и нормируются расцентровки роторов лишь по тем статическим усилиям, которые дополнительно возникают в опорных конструкциях после соединения полумуфт. В связи с этим представляют интерес расчеты динамических нагрузок на опоры несоосных роторов, соединенных как жесткой, так и гибкой муфтой. Радиальная несоосность. Рассмотрим два ротора, соединенные жесткой муфтой с радиальной несоосностью р (рис. 1.18, а). Для большей наглядности вначале исследуем случай безмассовых роторов, т. е. без учета сил инерции. Рассматриваемая схема является статически неопределимой, поэтому для решения задачи используем условие совместности деформаций валов в плоскости сочленения полумуфт. Пусть для каждого из валов 1 и 2 связь между прогибом v и углом поворота сечения t; в точках и О2, и силой Р и моментом
М, приложенными в тех же точках, имеет вид: у, = й,р + Ь,М; VigiP + hiM, (1.90) где bi, gi, hi (i 1, 2)- коэффициенты податливостей, равные соответствующим деформациям концевых сечений валов после приложения к ним соответствующих единичных сил или моментов. 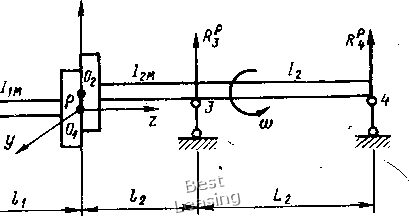 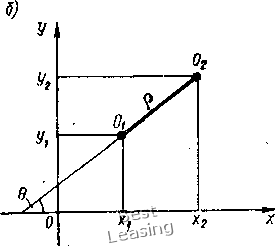 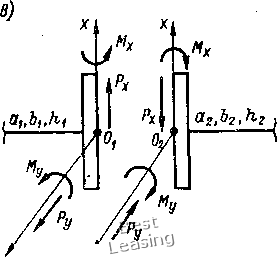 расчетная схема; б к опре- Рис. 1.18. Радиальная несоосность валов: а делению соотношений между координатами центров полумуфт; в - схема - действия нагрузок в плоскости сочленения полумуфт В случае абсолютно жестких шарнирных опор коэффициенты податливостей определяются по следующим формулам [1091: /?/(3£/м) + Пи{ЗЕ1д\ (1.91) bi=gi=W{2EIi) + liLc/{3EIi)y hi - til{EI) + Lil{3Eli)y где liy - моменты инерции площади сечения соответствующих участков валов; остальные обозначения ясны из рис. 1.18, а. Для определения положения полумуфт введем неподвижную систему координат Oxyz. Ось z совместим с линией опор 1-2, а ось л:-с линией несоосности 00 в положении равновесия системы (рис. 1.18, б). Через х, yt обозначим координаты точек Oi, через ф, Р/, 6 - углы поворота полумуфт и концевых сечений валов вокруг осей х, у и z соответственно. Между координатами имеют место следующие соотношения: • Xi -\- р cos 0; у2 il + р sin 9; 2-=i\ p2=-Pi. (192) Разъединив мысленно полумуфты и заменив действие одного вала на другой соответствующими нагрузками (рис. 1.18, <?), можно записать: Ух Pi a-iPx аРу giPx - KM,. O-iPx a-iPy (1.93) Решая систему уравнений (1.93) с учетом (1.92), получаем: Рд; = - Лр (cos 9 1); Mx=-Bq sin 0; Лр sin Э; h + А2 (Л1+А2) (а1+а2)-(Й1+б2)2 Bp (cos 9-1), 61 - 62 (А1+А2) (fli + аз)-(61-62) (1.94) (1.95) Предположим, что роторы вращаются с постоянной угловой скоростью (О. Как следует из выражений (1.94), при 9 = со/величины Рх и My имеют две составляющие - динамическую и статическую. Для динамических составляющих справедливы следующие выражения: Ар cos (ot; Мх Bp sin (at; Ap sin (ot; MyBp cos (at. (1.96) Таким образом, радиальная несоосность приводит к генерированию в плоскости сочленения полумуфт векторов возмущающей силы и момента, вращающихся с угловой скоростью со по направлению вращения вала. Введя комплексные величины Р - Р -~ iPy и М = Мх + ьМу, выражения (1.96) можно записать в виде: = Ар ехр i (cat + я); М = Bp ехр i {(at + я/2). (1.97) Из (1.97) следует, что вектор М отстает по фазе на угол п/2 от вектора Р- Кроме того, векторы реакций валов образуют в плоскости сочленения полумуфт пару сил с плечом р, которая вызывает синусоидальное возмущение приложенного крутящего момента с амплитудой Ме = Лр-38 Зная действующие на &ал нагрузки, нетрудно найти амплитуды динамических реакций опор агрегата. Положив для определенности bi > находим: K+4)-pi = р+р- (1.98) Динамически наиболее нагруженными являются опоры 2 и 3, несущие консольные части валов. Угловая несоосность (рис. 1.19). Систему координат Oxyz расположим так, чтобы ось z совпадала с линией опор 1-2, 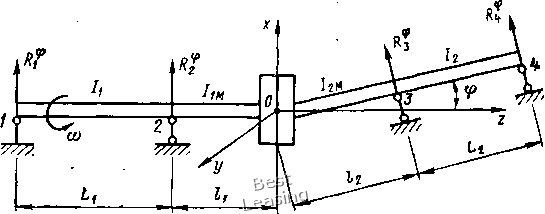 Рис. 1.19. Угловая несоосность валов а ось X лежала в плоскости несоосности, образованной осями валов в недеформированном состоянии. Как и прежде, Xi и (t = 1,2) - координаты точек 0; ур, р-, 0 - углы поворота концевых сечений валов вокруг осей х, у, z соответственно. Между координатами имеют место следующие соотношения: Хх; у2 - yi; - -фа = 1- ф sin 6; Рз = + ф cos 6. (1.99) Уравнения, связывающие в данном случае перемещения концевых сечений валов и приложенные к ним нагрузки, легко получаются из уравнений (1.93), если в них положить р = О, а вместо Р2 записать pg - ф. Выражения для динамических составляющих нагрузок, действующих на концах валов, выводятся аналогично предыдущему и имеют вид: Рх - -Вф cos (at; .М? = Сф sin <at; Р = 5ф sin (at; -Сф cos (at; Р - Бф ехр i(at; М = Сф ехр i ((at я/2). (1.100) 0 1 2 3 4 [ 5 ] 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||