

|
|

|
Промышленный лизинг
Методички
ai + аг Векторы и /ИР вращаются по направлению вращения вала, причем отстает по фазе от Р на угол я/2. Угловая несоосность, как и радиальная, кроме динамических нагрузок Р и генерирует также синусоидальный возмущающий крутящий момент с амплитудой = Сф. I Выражения для модулей векторов динамических реакций опор агрегата имеют вид: и. \ 2 / Сф ; Rt (1.102) Как и прежде, динамически наиболее нагруженными являются опоры 2 и 5. Анализ выражений (1.98) и (1.102) показывает, что при фикси- рованной суммарной длине консолей 1 + / /, имеющих обычно /о., ~ I, динамиче- одинаковые моменты инерции сечений - гл ские реакции опор Rj, вызванные угловой несоосностью, зависят от соотношения между и имеют минимум при l/(2EI) + lL2/{3Eh) 3£-1 (Li/h + L2/h)+ll{EI) (1.103) Выражение (1.103) вытекает из условия Ьх-Ьг = О, при выполнении которого В = 0. Динамические ракции опор вызванные радиальной несоосностью, от соотношения между величинами li и 1 не зависят. На рис. 1.20 в качестве примера представлена графическая зависимость Rf от соотношения li/l для схемы, имеющей следующие данные: Z = 50 см; d = 15 см; Li = = 200 см; dx = 22 см; da = 30 см. Минимальное значение функция имеет при liH = = 0,42. Смешанная несоосность. Предложим, что роторы имеют оба вида несоосности. Оси координат xyz направим так же, как в случае радиальной несоосности (см. рис. 1.18). Пусть осевая плоскость, в которой находится угловая несоосность, образует с плоскостью радиальной несоосности, в которой лежит ось X, угол а. Как было показано выше, в плоскости сочленения полумуфт действуют силы и моменты, выражения для которых в данном случае можно представить в виде: Р == Ар ехр i (со/ + я); = Bp ехр i (со/ + я/2); РР = Вф ехр / {(x>t + а); М" = Сф ехр / (со/ - я/2 + а), j 40 (1.104) Взаимное расположение векторов на фазовой плоскости изображено на рис. 1.21. Совершенно очевидно, что суммарные силы и моменты от обоих видов несоосности имеют минимальные значения при ее === О, а максимальные- при а - я. Динамическая реакция /-й опоры при произвольном значении а определяется по формуле R.R - Rjcosa, (1.105) где R и находятся из выражений (1.98) и (1.102). Влияние сил инерции. Рассмотрим систему из двух уравновешенных однодисковых роторов 0J ол 0,6 Ijl Рис. 1.20. Зависимость динамической реакции опоры от расположения муфты при угловой иесоосности валов
Рис. 1.21. Фазовые соотношения между векторами нагрузок при смешанной несоосности . массами/Пх и т, имеющих радиальную несоосность р (рис. 1.22). Массами валов и полумуфт, а также гироскопическим эффектом дисков пренебрегаем. Мысленно разъединив валы и дополнительно нагрузив их силами инерции, получим: Xi = аРх + biMy -1- /niXx6„i; аРу - ЪхМх + miFi6„i; = - giPy + hiMjc- тхУхУмх; Pi = giPx + hiMy + mxXiYMi; = -giPy-hMx- (1.106) « где Х, У; (( =1, 2) - координаты центров тяжести , дисков; б / = 1, 2, м) - коэффициенты влияния, равные перемещению i-й точки вала при приложении в /-й точке единичной силы; yij - коэффициенты влияния, равные углу поворота сечения 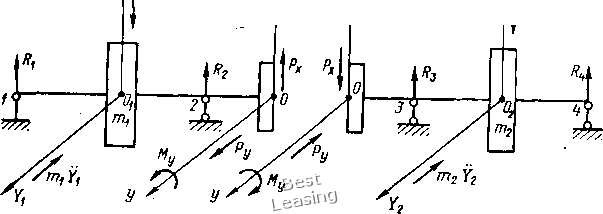 Рис. 1.22. Схема нагрузок в случае несоосных роторов с учетом сил инер- ции масс вала в /-Й точке при приложении в /-й точке единичной силы (или то же, что равные перемещению вала в й точке при приложении в /-Й точке единичного момента); м -• индекс муфты. Из уравнений (1.106), с помощью соотношений (1.92), исключаем неизвестные х, tji, -ф, р. Оставшиеся восемь уравнений, введением комплексных переменных S = X у\ = + iMy приводятся к виду: "iSiiSi + Si + 6i "гОггг + 2 - гы "lYMiti + myu2U+{gi 2) «а) p ехр idit. TimII = Y2m11 = - i {hi i [b. 0; 0; Л2) Л = 0; - 2) 11 = (1.107) Частное решение системы уравнений (1.107) отыскиваем в виде; li = Zt ехр icat; S2 == 2 ехр iatt; I = Р ехр Ti = iM ехр ico/. (J.108) Подставив (1.108) в (1.10?) и произведя преобразования, получим систему алгебраических уравнений относительно модулей комплексных переменных вида: (1 - miCo6ii) Zi + 6i„P (1 - /713(0622) Z2 - бамР + (1-2) + (/ii +/2) М = 0; - /"iwSiZi + mtii4Zi + (ai + a) P + (bi-2) M--p. Искомые амплитуды находятся из (1.109) по формулам q - А,/А (q = Zi, Z2, Р, М), (1.109) (1.110) где Д - определитель системы; - определитель, получающийся из А заменой столбца, составленного из коэффициентов при q, столбцом, составленным из свободных членов. Уравнение А = О есть частотное уравнение, из которого находятся собственные частоты (критические скорости системы o)i и (Оа)- Динамические реакции опор определяются по формулам: Ji р /П1(о Zf, 1 2г7 /2 п M-- 2(0 Z2; /П2(0 Z2. (1.111) Динамические реакции опор вызванные угловой несоос-ностью ф с учетом сил инерции, находятся по аналогичной методике и определяются по формулам (1.111), где Р, УИ, Zi и Z2 находятся из следующей системы алгебраических уравнений: (1 ~ mi(o6ii) Zi + 6i,P + YimM - 0; (1 - m 2(06 22) 2- зм + V9mA1 = 0; ftiiOYiZi- т2(о7м222 - Y2M (1.112) - mi(oS,iZi + m2(o6j222 (ai + as) P + (&i- 2) M = 0. Пример 1.3, Вычислим максимальные динамические нагрузки на опоры агрегата, состоящего из двух одинаковых однодисковых роторов. Роторы соединены жесткой yфтoй с радиальной несоосностью р (см. рис. 1.22). Исходные дайные: Щ= тп- !,S кгс-ссм; = = 200 см; /, = L = = 25 см; da = 22 см; du = 15 см; £ = 2-106 кгс/см. Обозначения размеров соответствуют схеме на рис. 1.18. Вычисления производим в такой последовательности. Моменты инерции площади сечений участков валов: hu = 2490 см*; = 16 300 см*. Коэффициенты влияния по формулам (1.91): ai= аа= 2,85-10-6 см/кгс; &i = = = 1Г2 = 13,5-10" 1/кгс; К = Л2=ч7.9-10-» 1/кгс-см. 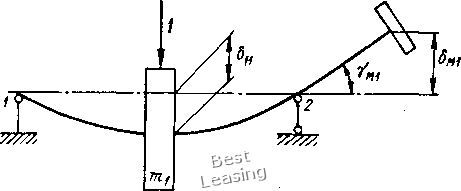 Рис. 1.23. К определению коэффициентов влияния вала ротора Остальные коэффициенты влияния, входящие в (1.106), находим с помощью схемы, изображенной на рис. 1.23: бм1 = бм2 = Ymi/i = 2,7-10~ см/кгс. Записываем систему уравнений (1.109): (10«~ 10,8ш2) Zi+ 2,7/+ 0,1Ш = 0; {W - 10.80)2) - 2,7Р + 0,1 Ш - 0; - 16.5cd2Zi - I6,5q)2Z2+ I,58M = 0; - 4,05co2Zi4- 4,05(o2Z2 + 4,7P = -plO Составляем определитель системы (1.109): 10*-10,8(03 О = 1,Ы0-г 1/кгс; (1.113) 16,50)2 4.05о)2 106 - 10,80)2 - 16,5о)2 2.7 0,11 2,7 0,11 О 1,58 4,7 О (1.114) 4,05ш2 Приравняв определитель (1,114) нулю, получим уравнение частот, из которого найдем критические частоты системы: 0)1 = 340 с-1; 0)а= 408 с"!. Амплитуду колебаний первого диска находим по формуле г.-д/д, где Ai - определитель, полученный из А путем замены его первого столбца столбцом свободных членов уравнений (1.113). Аналогичным образом определяем остальные амплитуды, причем после соответствующих преобразований получаем: Zi - 2,7.10V 21,80)2+4,7(106 -10,80)2) (1Q6- 10,80)2) iQ6p , 21,80)2 + 4.7(106-10.80)2) = 0; Za = -Zi. (I.115) Анализ формул (1.115) показывает, что имеются значительные различия между вынужденными-колебаниями, вызванными несоосностью валов, и вынужденными колебаниями вследствие неуравновешенности дисков. Г7777 7. Ш, 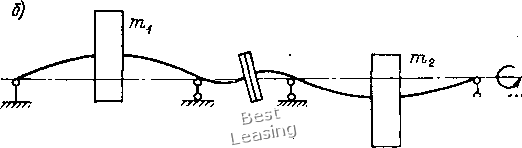 У7777> 2 Рис. 1.24. Собственные формы колебаний связанных- роторов: Ш а - первая; б - вторая Во-первых, несмотря наТто, чтоТсистема имеет две критические скорости (собственные частоты), амплитуда колебаний диска Zi и амплитуда возмущающей силы Р неограниченно возрастают лишь при второй критической скорости о) - 0)2, оставаясь ограниченными при первой критической скорости о) - 0)i. Причина этого явления заключается в том, что при свободных колебаниях с первой собственной частотой отклонения дисков находятся в фазе, а со второй собственной частотой - в противофазах (рис. 1.24, а, б). Как следует из (1.115), форма вынужденных колебаний дисков определяется по формуле Z2 ~ -Zj, т. е. совпадает с формой свободных колебаний со второй собственной частотой. Во-вторых, амплитуда Р становится равной нулю при частоте вращения, равной парциальной собственной частоте о) каждого ротора до их соединения. Величина (о определяется из уравнения 106-10,8й)2 = О и составляет = = 304 1/с. Объясняется это следующим. Величина Р уменьшается с увеличением податливости валов в точках их соединения. При возрастании о) от нуля-до о) динамическая податливость валов за счет сил инерции увеличивается и без учета сил сопротивления неограниченно возрастает при о) - > w. Амплитуда Р при этом уменьшается до нуля. 0 1 2 3 4 5 [ 6 ] 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |