

|
|

|
Промышленный лизинг
Методички
Интегрируя уравнения (1.133) при граничных условиях (1.134), получаем: v{x) w(x) albi X 1 (1.135) d " \ * I J Из последних уравнений видно, что температурные прогибы цилиндра вызываются только первой гармоникой разложения температуры поверхности в ряд Фурье. Физически данный факт очевиден. Действительно, гармоники с номерами /г > 1 обладают симметрией, т. е. для каждой из них точки поверхности цилиндра 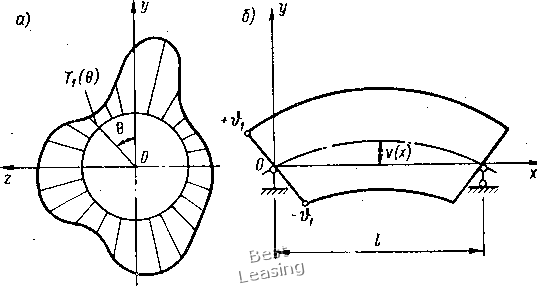 Рис. 1.28. К определению температурного эксцентриситета цилиндра: а - распределение температуры поверхности; б - температурный прогиб цилиндра с одинаковой температурой повторяются через равные интервалы 2п/п. Первая же гармоника определяет температурную асимметрию цилиндра, так как вызывает больший нагрев одной половины цилиндра по сравнению с другой. Так как отношение v/w не зависит от х, to изгиб цилиндра происходит в одной плоскости. Для большего удобства совместим плоскость изгиба с одной из координатных плоскостей, например с ху. Угол 8, на который необходимо повернуть цилиндр вокруг оси X до совмещения плоскостей, определяется из выражения для первой гармоники = Ui cos 9 + bi sin 9 cos (9 - e). где = ]/a2 + Ь2 - амплитуда первой гармоники разложения температуры поверхности в ряд Фурье; г = arctg bi/a- начальная фаза. После совмещения плоскостей кривая полного прогиба, лежащего в плоскости ху, определяется параболической зависимостью вида: (l--f). (1.136) V{X) -X Температурный прогиб при этом направлен в сторону образующей цилиндра (рис. 1.28, б), температура точек которой, создаваем;ая первой гармоникой, максимальна и равна (+&i). Максимальный прогиб имеет место в сечении д: 2 и равен t;ax = (aFi)/4d. (1.137) Температурный эксцентриситет центра масс цилиндра 67-находится по формуле 67-- [m{x)v{x)dx, (1.138) где т {х) - погонная масса цилиндра; т - суммарная масса. При равномерном распределении массы по длине т {х) = mil и и формулы (1.138), с учетом (1.136), получаем bj {аЬх1)т. (1.139) В случае, когда распределение температуры описывается выражением (1.130), температурные прогибы определяются аналогичным способом и составляют: . vix)- х{1-х) [3ai + Л.(/ + х)\. W (х) х(1~х) [3bi + Bi (/ + л:)]. (1.140) Изогнутая ось цилиндра, описываемая выражением (1.140), представляет собой пространственную линию, так как отношение v/w зависит от х. Температурные прогибы роторов. Очевидно, что при стационарной работе машины температурная асимметрия может появиться только у роторов с внутренними источниками тепла. К данному типу роторов относятся главным образом роторы электрических машин. Можно отметить следующие основные причины возникновения температурной асимметрии роторов данного типа: 1) неодинаковые условия теплообмена в одном или нескольких несимметрично расположенных пазах; 2) неодинаковые размеры поперечного сечения (или засорение) вентиляционных каналов; 3) неодинаковые условия теплопередачи между железом и валом ротора по угловой координате, которые вызываются не-круглостью вала, отверстиями в железе, наличием на валу шпоночной канавки и т. д. В последнем случае, вследствие неизбежных зазоров между контактными поверхностями шпонки, вала и железа ротора, условия теплопередачи на шпоночном участке сечения вала ухудшаются и температура его по сравнению с другими участками понижается. Температурная асимметрия в данном случае может быть устранена применением не одной,, а нескольких симметрично расположенных шпоночных креплений. Определение температурных прогибов роторов при известном распределении температуры в них может быть произведено с помощью формул (1.119)-(1.121). В силу случайности перечисленных выше причин температурной асимметрии роторов, ограничимся приближенным анализом с использованием результатов, полученных для цилиндра. Предположим, что бочка ротора (или участок вала, несущий железо ротора) имеет форму цилиндра радиусом г (диаметром d) и длиной I (рис. 1.29). Температура поверхности цилиндра опре- дел яется выражением (1.131), в цилиндре установилось температурное поле, определяемое формулой (1.132). Крайние участки вала между бочкой ротора и опорами имеют одинаковую длину /i. Общая длина ротора L " 2Zi + • Предположим также, что на ротор не действуют внешние нагрузки, в том числе и сила тяжести. Справедливость такого предположения следует из отмеченной выше возможности наложения решений. Дифференциальное уравнение изогнутой оси ротора при совпадении плоскости изгиба с координатной плоскостью ху определяется выражениями: . *, . - О при О < л: < Zi, (/i -[-/)< X <: L; 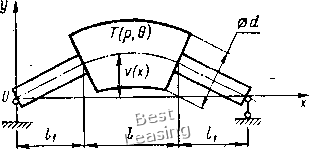 Рис, 1.29. Расчетная схема ротора электрической машины - при Zi < X < (Zi -\-1). (1.141) Решение уравнений (1.141) при граничных условиях v (О) - V (L) = О имеет вид: - х при О < i < /i; [Lx - tti] при >/i < X < (Zi + ly* . - x) при {l ~t)<x<L. (1.142) Следует отметить, что крайние участки вала сохраняют прямолинейную форму, так как они свободны от нагрузок. Пренебрегая массами крайних участков вала и считая, что масса бочки ротора распределена равномерно, из формул (1.138) и (1.142) находим 8-~ a*iP [\ + (1.143) Для оценки влияния длины крайних участков вала на-температурный эксцентриситет центра масс предположим; что длина бочки ротора равна одной трети междуопорного расстояния, т. е. I = li = ~~L. Из формулы (1.143) получим {la&jyQd. (1.144) При /х = О та же формула примет вид (1.139). Следовательно, в рассматриваемом случае за счет поворотной деформации крайних участков вала эксцентриситет центра масс ротора в семь раз больше, чем без этих участков. На практике электрические машины являются, как правило, частью машинного агрегата имеющего три, четыре и больше опор. Рассмотрим вначале трехопорный турбогенератор, ротор которого представляет собой статически неопределимую балку (рис. 1.30, а). Прогиб в этом случае можно определить путем наложения решений v-x (х) и (х), найденных для раздельно действующих нагревания и реакций опор. Первая часть решения Vi (х) определяется тз уравнений (1.141) и удовлетворяет* граничным условиям t(0)== - v{lr) = 0. В последней точке прогиб (рис. 1.30, б) 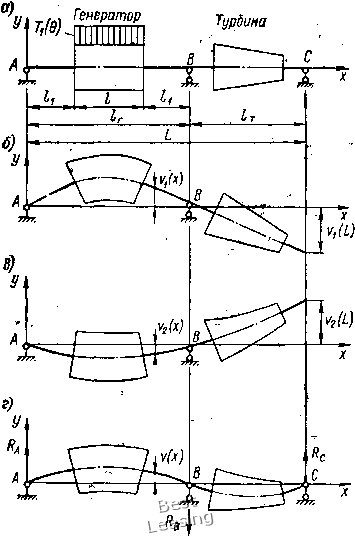 v,iL) If. (1.145) Рис. 1.30. Температурный прогиб ротора трех-опорного турбогенератора: а - расчетная схема;. б- прогиб от нагревания; в - прогиб от реакций опор; г - суммарный прогиб Следовательно, вторай, часть решения (х) представляет собой решение, соответствующее балке, не подверженной температурной нагрузке, шарнирно-закрепленной в точках А и В (рис, 1.30,-в) и удовлетворяющей при х L следующим условиям: s = -7Г-г, - = 0 (1.146) Искомый прогиб V {х) будет равен сумме (х) + (х) (рис. 1.30, г). Эксцентриситеты центров масс роторов генератора и турбины определяются по формуле (1.138). Реакция опоры Rq находится как произведение (L) на жесткость балки на изгиб в сечении х == L, а реакции опор Rj и Rq-из уравнений равновесия. Таким образом, втрехопорном агрегате температурный эксцентриситет центра масс ротора генератора несколько уменьшается по сравнению с двухопорной конструкцией. В то же время появляются эксцентриситет центра масс ротора турбины и дополнительные динамические нагрузки на опоры i?, Rq, Rq, векторы которых расположены в плоскости температурного изгиба и вращаются вместе с ротором. Эксцентриситеты центров масс роторов генератора и турбины находятся в противофазах. Определение температурных прогибов роторов и реакций опор в случае четырехопорной конструкции агрегата производится таким же методом, что и в случае трехопорной конструкции. Различие состоит в том, что эксцентриситеты центров масс роторов будут находиться в одной фазе. Пример 1.4. Предположим, что температурное возмущение ротора электрической машины может быть описано функцией, имеющей вид треугольника с высотой /г и основанием ф = 30° на окружности, проходящей по дну пазов (рис. 1.31). Требуется найти h, при которой температурный эксцентриситет центра масс ротора равен I мкм. Материал ротора имеет коэффициент линейного расширения а - 1,2-Юб 1ЛС. Задаемся расчетной схемой, в которой бочка ротора приближенно заменена цилиндром, имеющим диаметр, равный диаметру окружности, проходящей по дну пазов. Вычисления- производим для ротора, имеющего следующие размеры (рис. 1.29): L 270 см; / 90 см; d == 28 см. Из формулы (1.144) находим амплитуду первой гармоники di= 0,025°С. Зависимость1 от h находим по формуле для коэффициента тригонометрического ряда (1.128), имеющей вид 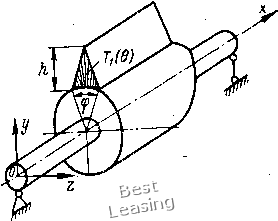 Рнс. 1.31. Пример температурного возмущения ротора электрической машины h 1 отсюда eVosedG 4 1 0,3° с. Как видно из примера, относительно небольшое температурное возмущение может вызвать ощутимый эксцентриситет центра масс ротора. 6. Другие факторы влияющие иа виброактивиость роторов -Неуравновешенность роторов. Известно, что вращающееся тело не оказывает никакого возмущающего действия на опоры, если ось вращения совпадает с одной из главных центральных осей инерции тела. В процессе изготовления ротора невозможно точно удовлетворить этому условию вследствие нарушений геометрических размеров, неоднородности материала и некоторых нарушений симметрии в распределении масс. В связи с этим роторы подвергают уравновешиванию, или балансировке. Уравновешивание жесткого ротора обычно производится путем прикрепления к ротору грузов в двух произвольно выбранных сечениях (чаще всего на двух торцевых поверхностях). Задача заключается только в определении положения и величины балансировочных грузов, что не вызывает затруднений, так как для этой цели разработано достаточное число надежных методов, измерительной аппаратуры и балансировочных машин [31]. Уравновешивание гибкого ротора значительно сложнее, чем жесткого. Это объясняется тем, что положение центров тяжести сечений ротора зависит от упругого прогиба вала. При изменении частоты вращения изменяется упругий прогиб вала, что приводит к разбалансировке ротора. Уравновешивание гибкого ротора обычно производят путем поочередного устранения каждой составляющей разложения функции распределения дисбаланса по формам свободных колебаний ротора [31, 104]. Поскольку в реальных машинах полностью устранить неуравновешенность невозможно, а можно лишь уменьшить ее до некоторой величины, возникает вопрос о назначении допусков на остаточную неуравновешенность. Стремление иметь возможно меньшие остаточные неуравновешенности не всегда оправдано. Повышение точности уравновешивания связано с большими затратами времени и ограничивается точностью и чувствительностью балансировочных станков. Для характеристики неуравновешенного состояния ротора на практике применяется понятие удельной или условной неуравновешенности, которая равна отношению дисбаланса ротора в гссм к весу ротора в кгс и выражается в микронах. При статической неуравновешенности жесткого ротора условная неуравновешенность численно равна смещению центра тяжести ротора с оси вращения. При динамической и смешанной неуравновешенностях, а также в случае гибкого ротора, такой прямой связи со смещением центра тяжести нет. Однако условная связь может быть установлена по динамическим нагрузкам на опоры. ]3.опустимые величины этих нагрузок зависят от назначения и сферы применения машины, поэтому в каждой отрасли машино- 0 1 2 3 4 5 6 7 [ 8 ] 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |