

|
|

|
Промышленный лизинг
Методички
принимая угол р постоянным и равным средней величине и интегрируя в пределах дуги скольжения аг. получаем Fxc2. - iTT-=Т (cos-I--/.sin-f) f.c. = -(cos-f--/,sinA). Решение с учетом переменности угла р дано в работе (73]. Для дуги скольжения ведущего шкива при отсутствии радиального скольжения = О и = /, тогда хс1 2г/ cosf. На элемент ремня efgh (см. рис. 25, б), находящийся на части дуги сцепления действует осевая сила dF = dF, cos -I - / dF„ sin = (cos -- - / sin -f) dF,. Из суммы проекций сил на радиальное направление имеем 2F sin- dQiZ - 2zdF, sin - 2zf dF, cos = 0. Решая совместно последние уравнения, получим (р-яц) da dF = (f -/-ц) da , . . Ф \ / Ф - (cos -f - /sm -f) = f-f„ Интегрируя в пределах дуги an, имеем --г:-г «п» аналогично для осевой силы fn на второй части дуги сцепления ап при отсутствии радиального скольжения F-F„ „ 2г tg В оба последних выражения для ведущего шкива надо вводить fl, для ведомого - fg. Полная осевая сила на ведущем шкиве г Ft Fxi-cos tg(+p) tg-f- (70) и на ведомом Fx2 = - 2zft cos-f-/,sin) + F,-F П2 .i(-f+r) (71) Углы входа a„ определяют для каждого шкива по (63); вторая часть дуги сцепления ап = ап - ап- Угол скольжения а = = In tnlf и полный угол сцепления ап = а - а.. Приведенный коэффициент трения подсчитывают для ведущего шкива по формуле (45) и для ведомого - по формуле (44). Величина т может быть найдена по соотношению натяжений ветвей или по коэффициенту тяги яр: С достаточной точностью можно принять, что радиальные перемещения имеются по всей дуге сцепления, т. е. ап = О и ап = ап; тогда f .1 = 4h cos У- + . (70а) tg(-f-+p) f = -(cos-/.sin-) + F,-Fu 2г (71а) Так как модуль упругости ремня при растяжении больше чем на порядок выше модуля упругости при сжатии, то скорость тангенциального скольжения значительно больше радиальной скорости. Поэтому в первом приближении в формуле (71а) можно принять = О и = /. При этом условии и коэффициенте трения / 0,35 формулы (70а) и (71а) при рабочих режимах до а) 0,7 дают результаты, близкие к имеющимся экспериментальным данным, приведенным в работах [49, 64, 104]. Следует иметь в виду, что при сложности взаимодействия ремня и шкива и необходимости принятия ряда допущений теоретические значения осевых сил могут отличаться от действительных в пределах до 20%. Поэтому в ответственных случаях их необходимо проверять экспериментально. Из анализа формул (70а) и (71а) следует, что осевая сила на ведущем шкиве больше, чем на ведомом. На обоих шкивах эти силы в вариаторах изменяются в зависимости как от силового режима (изменяются F, F, F3, и а„), так и от скоростного (изменяются а, «„). В предельном случае (при буксовании) а„ = = о, и второй член в этих формулах пропадает; осевые силы тогда F --cns - Рх2 - 2zf,tg (-f+ Рг) В другом предельном случае (при холостом ходе) F = о, «с = о, «п = а, Fl = Fa = Fg. Для ориентировочных расчетов необходимую осевую силу нажатия можно определить по минимальной силе с учетом необходимого запаса сцепления, т. е. (72) Коэффициент запаса сцепления р можно принять равным 1,7 ... 2,2 для ведущего шкива и 1,2 ... 1,4 для ведомого. Во многих источниках для определения осевых сил на обоих шкивах приводятся зависимости, являющиеся трансформацией формулы (а) [104]. Как указано выше, эта формула действительна лишь для момента буксования, для нормальной работы она дает неверный, а для холостой работы абсурдный результат. В других работах осевые силы определяются в зависимости от силы предварительного натяжения Fq без учета нагрузки. Соответствующие формулы получаются из зависимостей (70а) и (71а) как частный случай при F< = о и а„ = а, т. е. как для холостого хода. Очевидно, что оба метода определения осевых сил не учитывают действительного взаимодействия ремня с ведущим и ведомым шкивами на различных участках дуг обхвата и не могут быть распространены на область нормальной работы вариатора. В работе [100] дана другая зависимость для определения осевых сил на обоих шкивах, однако она основана на искусственной схеме - наличии на дугах обхвата так называемой ортогональной точки - точки, в которой нормаль к ремню направлена по радиусу, и не учитывает действительной картины поведения ремня на шкивах. Для расчета осевых сил и анализа изменения их в зависимости от нагрузки и скоростного режима удобнее, эти силы выразить через окружную силу Ff С использованием формул (53) и (44) зависимости (70а) и (71а) приобретают вид • (706) (716) 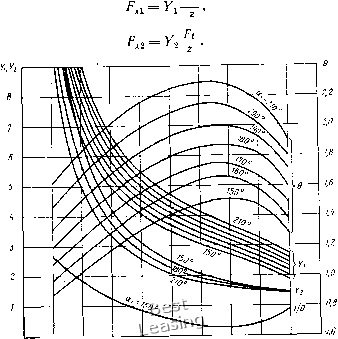 0,{ 0,г 0,3 0,t 0,5 0,6 0,7 0,3 0,9 ifr Рис. 31. Относительные осевые силы У1 и Уз и коэффициент 9 при ф = 26° Здесь и Fa относительные осевые силы: cos- т - \ 2/;tg(i+P.) 2tg 1 2tg(+p) (73) (74) На рис. 31 и 32 даны кривые 7i и в зависимости от коэффициента тяги при углах канавки ф = 26 и 28°, «1 = 150 ... 210°, / = 0,35 и = 0. Диаграммы действительны для вариаторов любых размеров. Каждая кривая диаграммы выражает закон изменения осевых сил F;,i и F в зависимости от нагрузки на скоростном режиме, соответствующем углу «1. При практических расчетах следует учитывать, что работа клиноременной передачи должна осуществляться при коэффициенте тяги а) = 0,6 ... 0,75. Ma этих рисунках даны Также кривые коэффициента 6, определяющего соотношение осевых сил, И для «1 = 150° - обратная величина 1/6. Как видно из этих диаграмм, каждой нагрузке и каждому передаточному отношению соответствует определенное значение 6. Следовательно, если задавать величины сил Fi и F, то при каждой нагрузке установится вполне определенное передаточное 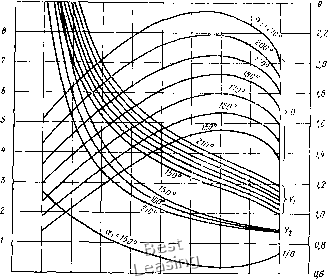 0,1 0,2 0,3 0,4 0,5 0,6 0.7 0,в 0,9 {*• Рис. 32. Относительные осевые силы и и коэффициент 9 при ф = 28° отношение. Это обстоятельство используют при применении автоматического регулирования скоростного режима в зависимости от нагрузки. В вариаторах с одним подпружиненным шкивом осевая сила на нем при данном скоростном режиме без учета упругости ремня постоянна и не зависит от нагрузки. Осевая сила на другом шкиве при этом изменяется: на ведущем шкиве при подпружиненном ведомом.- по кривым б и на ведомом при подпружиненном ведущем-, по кривым 1/6. На рис. 33 даны при том же значении / коэффициенты и в зависимости".от угла обхвата aj при гр = 0,6 и 0,7. Из диаграмм следует, что коэффициент У, а следовательно, и сила fa на всем диапазоне скоростных режимов (от «„ип До «щах) и данном гр колеблются незначительно; сила Fi изменяется в более широких пределах. Уменьшение угла канавки ф от 30 до 22° мало влияет на и и несколько увеличивает и Fi. Влияние изгибной жесткости и поперечной податливости проявляется и на величине осевых сил. Увеличение натяжений ветвей на величину Af, определяемую по формуле (67), вызовет повышение осевой силы Af =• Ч (2) 2tg(-f+р) 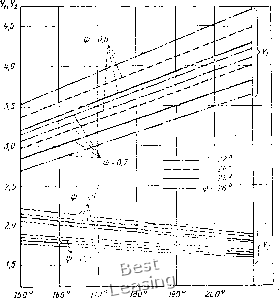 2/0° а, Рис. 33. Относительные осевые силы и Уг в зависимости от угла обхвата Наибольший прирост Af, будет при степенях тяги, близких к предельным. Зсе предыдущее рассмотрение проведено для стационарного скоростного режима. Исследования Ю. М. Мартыхина [55] показали, что при переходных режимах в процессе регулирования скорости взаимодействие ремня со шкивами то же, что и при установившейся скорости. Различие проявляется лишь в том, что при сближении дисков шкива угол скольжения уменьшается и тяговая способность данного шкива увеличивается; при раз-движении дисков происходит обратная картина. Кроме того, в процессе перемещения дисков доголнительно возникают сила трения Тш на шпонке или шлицах за счет передаваемого момента и сила трения 7 на валу в результате действия защемляющего 0 1 2 3 4 5 6 7 8 9 [ 10 ] 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 |