

|
|

|
Промышленный лизинг
Методички
момента от несимметричности приложения осевой силы Fx и от натяжений ветвей ремня - силы F, определяемой по формуле (55). При нагружении подвижного диска по схеме рис. 34 реакции на кромках ступицы Fa + 0,5f дб и R,=R- 0,5f где a 11 b - координаты центра приложения равнодействующей элементарных сил на рабочей поверхности. Общая сила трения при перемещении диска Т =T + T,-{ + Ri + R,)f,. (75) Здесь и / - диаметр посадочной поверхности и длина ступицы; /в -коэффициент трения ступицы по валу и шпонке. Приближенно можно принять, что силы Fx и Fa приложены в центре тяжести дуги обхвата. Более точное решение дано в работе [45]. Сила трения Т при сближении дисков суммируется с осевой силой со стороны ремня на диск, при раздвижении дисков - вычитается из нее. При воздействии на дан-Рис. 34. Схема усилий, ™й ШКИВ пружины В псрвом случас за действующих на подвиж- чет СИЛЫ трения осевое нажатие на ремень ной диск уменьшается, во втором - увеличивается. 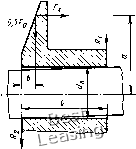 4.3. СКОЛЬЖЕНИЕ И ПОТЕРИ СКОРОСТИ Как показано в разделе 4.1, в результате продольных деформаций ремня при обегании им дуг скольжения возникает упругое скольжение ремня по шкивам. Согласно теории Н. П. Петрова при скорости ведущего шкива vj (на окружности, соответствующей нейтральной линии ремня) скорость ремня уменьшается от vi на дуге покоя до в точке сбега. Скорость возникающего скольжения изменяется от нуля до величины = vx - v2 в конечной точке дуги обхвата. Из условия постоянства массы ремня, пробегающей в единицу времени через данное сечение [66], ск = - Уз = 61-62 1 +81 где 61 и ба - относительные деформации ведущей и ведомой ветвей. Такая же скорость скольжения будет в точке сбега ремня с ведомого шкива. С достаточной точностью viFt kii . ск = Vj (61 относительное скольжение на каждом шкиве ~ Dl ~ Здесь k = удельная окружная сила или полезное напря- жение в ремне. Величина представляет собой относительную потерю скорости на упругое скольжение в результате продольных деформаций ремня. Помимо потери скорости и части передаваемой мощности, это скольжение вызывает износ ремня и его электризацию. Деформация сдвига ремня и возникающая вследствие этого депланация сечений (см. рис. 29 и 30) обусловливают вторую составляющую потери скорости j.. д. Вследствие этих деформаций на дугах сцепления скорость ремня в среднем по ширине сечения отлична от скорости шкива по нейтральной линии ремня: она меньше скорости ведущего шкива и больше скорости ведомого шкива. Согласно [51 ] эта потеря скорости £ я (f 1 - Fm)
0,1 0,H 0,6 4>mcx 1,0f Рис. 35. Кривая скольжения =c. д я/?1 Ч (2) 1 (2) (77) Общая потеря скорости в результате упругих деформаций растяжения и сдвига элементов ремня = ск + с.д- В отличие от относительного скольжения величина потери скорости с.д растет не пропорционально нагрузке. При малых и средних коэффициентах тяги j.. д мала и зависимость 1, от нагрузки почти линейна (рис. 35). С приближением же нагрузки к предельной д и быстро растут. Следует иметь в виду, что на всем протяжении кривой скольжения, т. е. при изменении коэффициента тяги от О до г5п,ах, характср взаимодействия ремня со шкивом один и тот же. Приводимое ранее утверждение, что в конце прямолинейного участка кривой скольжения угол скольжения распространяется на весь угол обхвата и что при дальнейшем росте нагрузки начинается буксование, ошибочно. Явления, обусловливающие потерю скорости от упругих деформаций ремня, одинаковы как для плоско-, так и для клиноременной передачи. В последней имеет место еще и кажущееся скольжение - изменение передаточного числа вследствие отклонений в расположении корда в ремне, отклонений в размерах ремня и канавки шкива и прЪсадки ремня при его поперечном сжатии в канавке. Как отмечено в разделе 1.2, кажущееся сколь- 9. Характер кажущегося скольжения
жение не является потерей мощности, оно характеризует лишь изменение расчетных диаметров шкивов. Две первые причины, а также просадка ремня от предварительного натяжения проявляются независимо от нагрузки передачи, и они дают одинаковую величину кажущегося скольжения ко как при нагрузке, так и на холостом ходу. Учитывая это, в испытаниях передач скольжение ко можно легко выделить, экстраполируя кривую скольжения до оси ординат. Она может быть также найдена из зависимости ёко- (я,а-я,1) • Здесь ?! и 2 экспериментально найденные потери скорости при коэффициентах тяги \pi и %, лежащих в пределах кривой скольжения, близких к прямой, причем % В зависимости от комбинации отклонений расчетных радиусов, как видно из табл. 9, кажущееся скольжение ко на холостом ходу может быть как положительное, так и отрицательное, когда действительная частота вращения ведомой системы больше теоретической. В вариаторах кажущееся скольжение ко может быть компенсировано начальным смещением дисков. При нагружении передачи ремень на дуге сцепления ведущего шкива вклинивается в канавку глубже, а на ведомом шкиве меньше согласно формуле (62) на ARl (2) = Яе 0 - 1 (2) 1 (2) (78) Передаточное отношение при этом увеличивается, частота вращения ведомой системы уменьшается, и тем больше, чем больше нагрузка передачи. Относительная потеря скорости - кажущееся скольжение к. обусловленная этим явлением, на основании зависимости (7) р r2x + iRjx Rix 1 /уо-. Rix + ARix r2x Значение AR берется со своим знаком (минус). Кажущееся скольжение суммируется с потерями скорости от упругих деформаций, и в испытаниях чаще всего фиксируется их общая величина. Поэтому экспериментальная величина потери скорости не определяет соответствующей потери мощности. Применяемые на практике различные методы, определения потери скорости могут фиксировать или общую величину I, или ее составляющие: 1 или 1ск- Кривые скольжения при этом будут различны, а результаты опытов не сопоставимы [74]. Кажущееся скольжение тем больше, чем меньше диаметры шкивов, больше ширина ремня и меньше его поперечная жесткость. При широких ремнях в вариаторах величина может составлять основную часть общей потери скорости. Так, при ремне 50 X 22 мм с £р = 4500 кгc/cм = 240 кгс/см, / = 0,5 в вариаторе со шкивами Ri R = 100 мм, ф = 28°, работающем при Fo = 77 кгс и 1)5 = 0,8, потери составляли = 0,36% и = = 1,50%. В вариаторах с подпружиненным шкивом вследствие повышенной податливости в осевом направлении кажущееся скольжение и общая потеря скорости существенно растут, что снижает жесткость кинематической характеристики (см. с. 82), 4.4. ТЯГОВАЯ СПОСОБНОСТЬ Тяговая способность является основным критерием работоспособности ременной передачи. Она характеризуется окружной силой Ft или полезным напряжением k, которые передаются при данных условиях работы. Обычно тяговую способность характеризуют кривой скольжения - экспериментальной зависимостью потери скорости % от относитэльной нагрузки - коэффициента тяги гз (рис. 35). Эти кривые совместно с кривыми КПД [ц) дают 10. Характеристики испытанных широких ремней
хорошее представление о работе передачи и позволяют устанавливать нормы нагрузки передач. При этом за исходную часто брали точку, соответствующую концу прямолинейного участка кривой скольжения. Из сказанного в разделе 4.3 о взаимодействии ремня со шкивом следует, что такой подход не правомерен, так как прямолинейного участка на кривой скольжения и не может быть. Правильнее нормы нагрузки устанавливать по предельному коэффициенту тяги ура с определенным коэффициентом запаса сцепления, назначаемым в зависимости от возможных нормальных перегрузок передачи. Как видно из формул (52) и (53а), тяговая способность зависит от фрикционных свойств рабочих поверхностей ремня и шкива, натяжения ремня, его скорости, угла обхвата, который в свою очередь зависит от передаточного отношения и относительной величины межосевого расстояния. В неявном виде на тяговую способность влияет также диаметр шкива. При рассмотрении кривых скольжения следует иметь в виду, что для клиноременной передачи фиксируется полная потеря скорости , включая и кажущееся скольжение к, не являющееся по существу потерей энергии. Вид кривой скольжения при этом будет также зависеть от продольной и поперечной жесткости ремня и его относительной ширины V. Влияние отдельных факторов на тяговую способность рассмотрим на примере испытаний ремней сечением 50 х 22 мм различных конструкций и ремня 80 X 25 мм, характеристики которых приведены в табл. 10. Ремни 1 ... 4 и 6 - опытные, ремень 5 - серийный импортный. На рис. 36 даны кривые скольжения ремней } ... 3 с разли -ным кордом, испытанных при i=l, i&= П и OqIO кгс/см\ а также ремней 2 и 5 при Оо = 7 кгс/см. Как видно, кордшнуровой ремень 2 по сравнению с кордшнуровым ремнем / обладал лучшей тяговой способностью - потеря скорости у него ниже, КПД выше. Потеря скорости, оказывается, не обратно пропорциональна модулю упругости Ер. Так, у ремня 3 с металлотро-сом при более высоком потеря скорости выше, а у ремня 5 при меньшем Ер, наоборот, ниже, чем у ремня 2 (при одном и том же Оо). Это объясняется различием в поперечной жесткости - пониженной у ремня 3 и повышенной у ремня 5, что изменяло величину кажущегося скольжения t. i,% 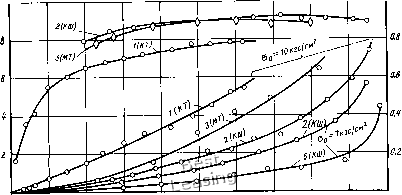 о 0,2 0,9- 0,6 0,S V Рис. 36. Кривые скольжения и КПД ремней сечением 50X22 мм различных конструкций Предельные коэффициенты тяги при i& = 9 и 11, Оо = 7 и 10 кгс/см были: для кордтканевых ремней / и 4- = = 0,82 ... 0,88, для кордшиурового ремня 2 и с металлотросом 3 - г5„ах = 0,89 ... 0,91, для ремня 5 - = 0,93 ... 0,95. Повышенное значение г5,пах для последнего ремня объясняется более высоким коэффициентом трения из-за отсутствия обертки. Из кривых скольжения, приведенных на рис. 37, для трех ремней, различающихся только шириной v = 9, = 12 кгс/см), следует, что с увеличением последней потеря скорости значительно возрастает и, следовательно, жесткость кинематической характеристики падает. Это указывает на необходимость повышения поперечной жесткости с увеличением ширины вариаторных ремней. Влияние предварительного натяжения и диаметра шкива на тяговую способность вариаторов проявляется так же, как и в обычных клиноременных передачах. Увеличение напряжения от предварительного натяжения повышает передаваемую нагрузку. Падение скорости I при этом повышается, но не пропорционально Go, а несколько меньше, что определяется характером изменения кажущегося скольжения. С увеличением диаметров шкивов протяженность дуги сцепления увеличивается и ее доля*в передаче нагрузки повышается. В результате дуга скольжения сокращается и тяговая способность 0 1 2 3 4 5 6 7 8 9 10 [ 11 ] 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||