

|
|

|
Промышленный лизинг
Методички
этой цели приходится одновременно смещать в осевом найравЛений весь вал. Если диапазон регулирования одной передачи недостаточен, используют двухступенчатые вариаторы (рис. 3, г ... д) с двумя последовательно расположенными передачами этого типа. В них могут регулироваться или два шкива из четырех, или все четыре шкива. В качестве тягового органа применяют клиновые ремни нормальных сечений и специальные широкие, плоские ремни с клинообразными колодками, а также специальные цепи. Ранее широко 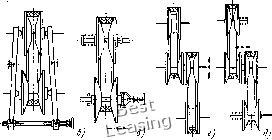 Рис. 3. Схемы вариаторов с гибкой клинообразной связью (стрелками показано направление принудительного перемещения регулирующего элемента) применялись вариаторы с колодочным ремнем. Они серийно изготовлялись на диапазон Д = 2, на мощность до 50 кВт и на Д = 16 и мощность до 20 кВт, но вследствие тихоходности уступили свое место клиноременным вариаторам. Бесступенчатые передачи со стандартными клиновыми ремнями просты по конструкции, но применение их ограничено малым диапазоном регулирования и относительно небольшой мощностью, так как с возрастанием последней увеличивается число ремней и усложняется конструкция. Эти недостатки отпадают при использовании специального широкого клинового ремня, особенно зубчатого. В настоящее время клиноременные вариаторы для малых и средних мощностей являются наиболее перспективными. Выполняются они по схемам, изображенным на рис. 3, а ... в, реже по схеме на рис. 3, г. Конструкции их весьма разнообразны. Широкое распространение получили также цепные вариаторы. Эти вариаторы отличаются надежностью действия и небольшими габаритами [30]. Чаще регулирование производят на ходу; в простейших конструкциях допускают изменение положения дисков только в покое. Спорадическое регулирование осуществляют механическими управляющими механизмами с ручным или машинным приводом, а также с помощью гидроцилиндров. Для автоматического управ- ления используют серводвигатели, работающие ot соответствующих датчиков, центробежные или кулачковые нажимные устройства, реагирующие на изменения частоты вращения или момента сопротивления. Ниже приведены общая теория бесступенчатых клиноременных передач, конструкция и расчет отдельных их типов. 2.2. ГЕОМЕТРИЯ ПЕРЕДАЧИ Углы обхвата на шкивах в любом положении связи находят (рис. 4) из зависимости а, = 180° г;: 27,. (10) Знак минус для меньшего шкива, плюс - для большего. Угол Ух определяют по формуле гибкой 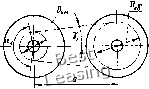 Рис. 4. Геометрическая схема передачи где И Z),„ - больший и меньший диаметры шкивов; а - межосевое расстояние. При > 110% значения углов обхвата можно находить по формуле а, = 180 ± 60 . (10а) Расчетная длина ремня в любом положении может быть определена по приближенной зависимости L = 2а + {Dx, + Dx) + """-f-. (12) При этом ее следует находить для одного из крайних положений: на и di или и d. Удобно рассчитывать по формуле L = 2а 4- Al -Ь (12а) Al = 0,5я {Dx, + Dx) и А = 0,25 (D, - DxJ. Определенную по этим формулам длину ремня округляют до ближайшего стандартного значения. Окончательное межосевое расстояние находят по стандартной длине из зависимости а = 0,25 [(L - Al) + K(L - Ai) - 8AJ. (13) При a < 140° длиру L следует проверить по формуле L =rrcos f f -f - (De + Ям) + {Dx6 - Ям), (14) где 7 = 90 - 0,5a. в передачах с одним регулируемым шкивом межосевое расстояние переменно. Длину ремня определяют при положении его на наибольшем диаметре этого шкива, для чего предварительно задаются наименьшим межосевым расстоянием. После округления значения длины ремня находят межосевые расстояния аах и алп для обоих крайних положений. Для компенсации возможных отклонений по длине ремня, его вытяжки, а также для свободного надевания ремня в конструкции передачи должна быть предусмотрена возможность увеличения межосевого расстояния от наибольшего расчетного на 3% L и уменьшения от наименьшего расчетного на 1,5% L. В передачах с двумя регулируемыми шкивами компенсация отклонения по длине и вытяжки может производиться либо изменением межосевого расстояния, либо дополнительным сближением или раздвижением дисков. В первом случае предусматривается возможность изменения величины а в указанных пределах, 2. Определение диаметров шкивов Способ установления диаметра d (выбирается или рассчитывается) D (рассчитывается) При регулировании несимметричном 1 max I симметричном или (А) =dilma-< (1 - I) d=dx=d2 ИЛИ (А) D = Dl = = = dlД несимметричном max < d« или tmin (1 - I) bo втором - шкивы должны иметь некоторый запас по диаметрам. Из формулы (12) следует, что если межосевое расстояние постоянно, то длина ремня в разных положенях будет различной. При = 1. = D она будет наименьшей, в крайних положениях - наибольшей. Если необходимое натяжение установлено по среднему положению, то на всех остальных режимах ремень будет натянут больше необходимого, что снижает его долговечность. Если же натяжение выбрано по крайним положениям, то в середине диапазона не обеспечивается необходимая тяговая способность. Вследствие высокой изгибной жесткости клинового ремня свободные ветви его отходят от прямолинейной формы. В результате действительные углы обхвата оказываются меньше теоретических, определяемых по формуле (10) или (10а) (см. с. 63). Минимальный расчетный диаметр d меньшего шкива устанавливается по опытным данным, исходя из условия обеспечения достаточной долговечности ремня. Удобнее вначале определить не d, а & = dih (h - высота сечения ремня) и найти d из совместного рассмотрения условий обеспечения тяговой способности, заданного диапазона регулирования и полученного Подробнее последовательность определения величины d приведена ниже. Наибольший расчетный диаметр D второго шкива находится по соответствующему передаточному отношению (табл. 2). Диаметры шкивов для другого крайнего положения (при несимметричном регулировании) и для всех промежуточных передаточных 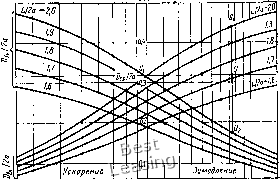 Ор 0,3 Ofi 0,5 Ofi 0,1 0,eO,SI,0 1,2 \,h t,S l,S,0?.Z 2,B ifl Рис. 5. Зависимость относительных диаметров D/2a от передаточного отношения ix при L = const чисел кинематически могут быть любыми в пределах определенных диаметров d и при условии, что DJDi = i. Здесь = = (1 - I) - отношение диаметров шкивов. Эти диаметры должны быть такими, чтобы необходимая длина ремня во всех положениях была одинакова и равна его длине L в крайнем положении, для которого найдены величины d и Г>. В противном случае натяжение ремня, а следовательно, и передаваемые им окружные усилия будут различными. Если подставить в уравнение (12) D = О/х. и решить его относительно D, то получим значение последнего, а также диаметра Dg, соответствующее постоянной длине ремня: D., =-jr-.--а. (15) На рис. 5 показана зависимость DJIa и DJ2a от передаточного отношения (ри L/2a = 1,6; 1,7; 1,8; 1,9; 2,0. Кривые могут быть ис-полБЗованы для ориентировочного определения относительных диаметров шкивов для передач с симметричным и несимметричным регулированием в пределах = 0,25 ... 4. Длина ремня при 1=1 будет L = 2a + jiD,p. Отсюда находятся диаметры дисков Dp, соответствующие ix = 1, на которых ремень должен работать при условии сохранения постоянства его длины: L - 2а 2а / L ,\ (16) или, вводя сюда выражение для L из формулы (12) для промежуточного и крайнего положений, Яр=-2-+-Ш- -2~ + 4яа • (б) Пример 1. Определить диаметры шкивов и длину ремня в различных положениях для регулируемой передачи с i. = 3 и (j = 0,5. Решение. Так как / > -77-, то наименьшим и наибольшим расчет- ными диаметрами являются d и (см. табл. 2). Предположим, что на основании расчета на тяговую способность с учетом долговечности d = 120 мм; тогда = = djtax~3 мм. По конструктивным соображениям принимаем ориентировочно а «s 400 мм; тогда при ( по формуле (12) длина ремня L = 1590 мм и А =,99. По формуле (15) для i. = 0,5 имеем = 328 мм и = Clmin = 32 X 0,5 = 164 мм. При этих диаметрах длина ремня L = 1589,6 мм, т. е. практически совпадает с длиной при (ах- Диаметры в среднем положении Оср = L - 2a 1590-800 = 251,5 мм. Если находить диаметры из условия Dix + Dx = Dl da = dl + 2 = const, D, = di-fDj 120-f 360 1 4- «min = 320 mm, dj = Difmin = 160 mm и Dcp 0,5 (Dl + da) = 240 мм. В этом случае необходимая длина ремня при (j была бы L = 1570 мм, а при t = 1, L = 1554 мм. Если ремень натянуть в положении при ta когда L= 1590 мм, то при переходе в среднее положение он укоротится на 36 мм, а в положении при min-на 20 мм. При указанных положениях падение натяжения при модуле упругости ремня Ер = 3000 кгс/см будет пропорционально изменению напряжении Аа = Ег,~= 3000 -tIL = 68 кгс/см. До = 3000 20 1590 1590 = 38 кгс/см2, Так как напряжение от преДва1)ИтеЛЬНоГо натйжениЯ CTq = 20 ... 25 кгс/см, то, следовательно, ремень в указанных положениях будет не натянут. Если же натяжение установить при ix= 1, то во всех других положениях натяжение ремня будет слишком большим, что резко снизит его долговечность. При передачах с одним регулируемым ведущим шкивом удобно вначале задаться диаметром di или отношением di/h и в последнем случае найти di из расчета на тяговую способность. Далее по и dl найти диаметр нерегулируемого шкива D, а по нему и i - диаметр D, после чего, как отмечено выше, установить длину ремня и предельные значения межосевого расстояния. Ьр 2Х 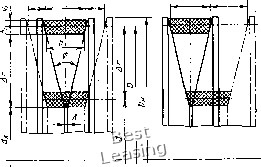 а) S) Рис. 6. Схема перемещения дисков и ремня в регулируемом шкиве: а - с двумя подвижными дисками; 6 - с одним Во всех разобранных случаях после определения диаметров шкивов следует по формулам (8) и (9) найти скорость ремня vy, скорость на ободе ведомого шкива Иобтах и сравнить их с допускаемыми. Для ремней вариаторов максимальная скорость составляет 25 ... 30 м/с; в вариаторах зерновых комбайнов ее доводят до 40 ... 44 м/с. Предельные значения Uogmax Даны в разделе 1.2. Если значения D„gn,ax выходят за пределы допускаемых, то частоту! вращения ведущего вала необходимо уменьшить. При конических дисках осевое перемещение каждого конуса в процессе регулирования от одного крайнего положения до другого составит (рис. 6, а) = -£zzltg4 = Artg-f = A. (17) Ширина канавки по нижнему основанию ремня fci = fcp-2/iitg-f. Если в каждом жйиве подвижным является лишь один диск (рис. 6, б), то его перемещение будет в два раза больше. 0 1 [ 2 ] 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 |