

|
|

|
Промышленный лизинг
Методички
с регулируемым межосевым расстоянием определяют пределы его изменения (см. с. 22). 12. Как указано на с. 125, находят конструктивные диаметры Dh и шкивов и контрольный размер т. 13. По формуле (25), определяя зазор А, проверяют возможность регулирования. 14. Из выражения (17) устанавливают перемещение дисков. 15. Определяют для крайних положений окружные силы и по формулам (53), (57), (70а) и (71а) натяжения ветвей при работе Fi, F2, в покое /"о, а также осевые силы F,i и F- 16. Рассчитывают пружину. 17. Делают поверочный расчет ремня. Поверочный расчет ремня проводят для 6 ... 8 положений, определяемых координатой Xi подвижного диска ведущего шкива. Порядок расчета может быть следующим: по координате из формулы (17) находят Di и из зависимости (12) D затем передаточное отношение i, из формул (11) и (10) углы у, а, а, частоту вращения «2*" по формуле (123) частоту пробегов ы, по моменту М окружную силу Ff, а по характеристике пружины или другого нажимного устройства осевую силу F и коэффициент 2 = FJFf. Далее методом итераций, решая совместно зависимость (74) и выражение т = е"<:22, определяют величины «.2, «„2, т, ар и из равенства aJ[ = aJ У"™ «с!- ош, по формуле (73) значение Yi и из зависимости (706) силу F. Затем определяют силы в ветвях f ц, Fl, F2 и напряжения а, а, 02, а„ и аах- В заключение по формуле (133) целесообразно сделать оценку возможной долговечности ремня. Пример 2. Рассчитать регулируемую клиноременную передачу от электродвигателя 4А112М4 мощностью N = 5,5 кВт при = 1445 об/мин в приводе пластинчатого транспортера. Диапазон регулирования Д = 5, желательно Imax = 3. Привод работает при постоянном моменте сопротивления Mg. Конструкция передачи по рис. 72. Ориентировочно межосевое расстояние 450...500 мм. Решение. 1. Минимальное передаточное отношение по формуле (3) тах 3 tmln =-д- = 0.6. 2. Частота вращения ведомого вала 1445 "1 1 max - -- = 2408 об/мив; 12 min - --~ - max ni 1445 = 482 об/мин. •3. Момент на ведомом валу. Согласно рис. 1, б полная мощность реализуется при (mm, тогда Л1,= 974-=974 -5-»-» 2 max КПД вариатора принят т) = 0,9. 2408 = 2,00 кгс-м. 4. На оснобании формулы (149) Dl (tmax-f 1) dl (Jmln-fl) 1.6 = 2,5. 5. Принимаем ремень из ряда 1-В с относительной шириной v = 3,1, угол канавки ф = 26°- При этих данных и D/d = 2,5 по номограмме рис. 58 можно принять относительный диаметр •di = 8. Относительно большое значение Ообеспечивает повышенную долговечность ремня. 6. По зависимости (145) допускаемое полезное напряжение [ft] = (20 - 4v) - = (20 - 4 - 3,1) i = 6 кгс/сма. 7. По формуле (150) наименьший расчетный диаметр ведомого шкива %/ 2МЩ \f 2-200.12 , . при этом train = 8 (mln-fl 1,6 Наибольший расчетный диаметр ведущего шкива 212 max 0,6 = 12. «i(i-i) = 254 мм. Здесь общая потеря скорости принята \ = 0,05. 8. Размеры ремня »12мм.; 6р =Av = 12-3,1 =37,2 мм. л=4 = . По табл. 6 берем стандартный ремень 1-В40 кордшнуровой зубчатый с размерами: 6р = 40 мм, А = 13 мм, Ар = 3,2 мм, площадью Si = 5,08 см и массой q = 0,63 кг/м. 9. Принимая межосевое расстояние а = 450 мм, по (12а) определяем длину ремня L = 1532 мм. Ближайшая стандартная длина L = 1600 мм, тогда ремень 1-В40-1600Ш -зубчатый ОСТ 38.5.17-73. 10. Окончательное межосевое расстояние по формуле (13) будет а = = 483 мм. Для компенсации отклонений в размерах и вытяжки межосевое расстояние должно изменяться в пределах: amm = а - 0,015L = 461 мм и атях = = a-f 0,03L = 533 мм. И. По формуле (15) при отношении диаметров i, = - ?) = 2,85 наименьший диаметр ведущего шкива = 102 мм, что больше минимального допустимого по стандарту dmin = 71 мм (см. табл. 15). Наибольший диаметр ведомого шкива , 2=1тах = 102-2,85 = 290 мм. 12. Конструктивные размеры шкивов (см. рис. 57) Dni = Dt -f 2с « 262 мм; Она = О2 -f 2с « 298 мм; "ifl] =«1 -2Ai « 82 мм и йв2 = 2-21 125 мм. При этом принято: с Ъ; = h - Ар. 13. Наименьший зазор между дисками ведомого шкива по формуле (25) Д = 6р ~ (Da - da-f 2Ai) tg--= 3 мм, что допустимо. 14. Перемещения дисков по формуле (17): atj = 17,5 мм и Х2 = 16,7 мм. 15. Приведенные коэффициенты трения sin-l- = 1,65 и Гг = - /cosP sin -I + sin P cos = 0,75. При этом принято: / = 0,35, ф : двух крайних положений. 16. Скорость ремня (м/с) nPixtii . " 60 17. Окружная сила (кгс) Ft = 2MJD 18. Углы обхвата по формуле (10а) 26° и Р = 30°. Дальнейший При Imax 7,7 13,8 / «1 = 158° = 2,76 рад 1 «2 = 202° = 3,52 рад 19. Углы скольжения «с и значения m и В данном случа жений тяговая способность лимитируется ведомым шкивом, так изведение aJ меньше. Принимаем = 0,602 2,11 рад Угол скольжения = «са/г/Я 0,96 Углы сцепления апх = - ах 1,80 ап, = «2 - 002 1,41 Значения m = е 4,85 Коэффициент тяги i) = (т - 1)/(т + 1) 0,658 20. Силы в передаче. Натяжение от центробежных сил (кгс) Натяжения ветвей (кгс) Ft+Fu 4,0 21,4 7,6 расчет ведем для При imin 19,2 27,6 193° = 3,36 рад 167° = 2,92 рад е для обоих поло-как для него про- 1,75 рад 0,8 2,56 1,17 3,7 0,575 25 . 62,8 35,2 т-1 Осевые силы (кгс): по формуле (70а) Fi 44 по формуле (71а) Fx2 23 Пружина при УИг = const ставится на ведомый шкив. Рассчитывается по л-2шах = 86,5 кгс, число ее витков определяется по полной деформации, определяемой по формуле (80): 47,5 тах - 2х,Рхы Fx2d-Fx2D 2-16,7-47,5 47,5-23 = 64,7 мм. 5.5. КЛИНОРЕМЕННЫЕ ВАРИАТОРЫ ТРАНСПОРТНЫХ СРЕДСТВ Клиноременные вариаторы нашли широкое применение в автоматических трансмиссиях транспортных средств: мопедах, мотороллерах, мотосанях; начинают применяться в микромотоциклах, мотоуборочных машинах. Применение в этих машинах клиноременного вариатора позволяет осуществить автоматизацию трансмиссии простейшими средствами без использования сложной электроники, упрощает управление машиной, так как водитель манипулирует только одной ручкой или педалью газа. Это в свою очередь повышает безопасность движения. Кроме того, наличие клиноременного вариатора упрощает трансмиссию, обеспечивает использование двигателя на оптимальных режимах и уменьшает токсичность выхлопных газов. Как известно, передаточное отношение трансмиссии транспортных средств должно изменяться в зависимости от скоростного и силового режима их работы. Для автоматизации управления клиноременным вариатором используется зависимость осевых сил от передаточного отношения и нагрузки передачи. Если регулируемым дискам предоставить свободу в осевом направлении и сделать осевые силы зависимыми от частоты вращения и передаваемого момента, то при изменении этих параметров диски будут автоматически перемещаться до установления 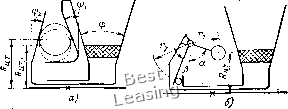 Рис. 91. Нажимные устройства клиноременных вариаторов: а - центробежное шариковое; б - центробежное рычажное; в - кулачковое нового равновесного состояния, изменяя передаточное число в соответствии с новым режимом. В качестве средств, воздействующих на осевые силы, применяют пружины сжатия и кручения, центробежные, кулачковые и вакуумные устройства. Комбинируя эти устройства и подбирая ИХ характеристики, можно добиться необходимого закона изменения передаточного отношения по скорости движения машины и нагрузке. На ведущих шкивах вариаторов мотосредств ставят, как правило, центробежные нажимные устройства, шарикового или рычажного типа. Осевая сила (кгс), развиваемая шариковым устройством (рис. 91, а), F = "шц. t"i cos ф1 cos ф2 90 sin (ф1 -f Фа) (152) где т - масса шара, кг; гщ *- число шаров; - частота вращения шкива; фх и фа - углы направляющих конусов;/?ti.T - радиус центра тяжести шара (м), связанный с перемещением Xi регулируемого диска зависимостью ц. т - -ц. т о + cos ф1 cos ( sin (ф1 + фз) (153) Осевая сила, развиваемая рычажным центробежным устройством (рис. 91, б), F - "РЦ- 1 sin а 90 rcosP (154) где т - масса одного груза, кг; - число рычагов-грузов; Гъ г, а, р - радиусы и углы рычага по схеме. Радиус центра тяжести груза Г) р I 1 cos «о-cos а «• ~ Г2 sin Ро - sin р (155) где ао и Ро - углы при /ц..о- Для обоих устройств -ц.то - радиус центра тяжести шара или груза в исходном положении, соответствующем iy. и = 0. Из зависимостей (152) и (154) видно, что осевая сила, создаваемая центробежным устройством, зависит от частоты вращения ведущего шкива (вала двигателя) и координаты положения регулируемого диска. Осевая сила, развиваемая пружиной сжатия, зависит только от перемещения х соответствующего диска: лпр = /прО + СпХ. (156) Здесь fi,p„ - минимальная сила пружины в крайнем положении подпружиненного диска; - жесткость пружины, кгс/мм. Кулачковое устройство (рис. 91, в) реагирует на изменение нагрузки, и осевая сила, развиваемая им при передаче крутящего момента М, /•к tg (р ± рк) (157) где - средний радиус кулачка; Р - угол подъема кулачка на среднем цилиндре; - угол трения. В формуле (157) знак плюс - при сближении дисков данного шкива и знак минус - при их раздвижении при установившемся режиме = 0. Как видно, трение на кулачке существенно влияет на осевую силу и искажает реакцию нажимного устройства на изменение крутящего момента. Поэтому целесообразно в кулачковом устройстве заменять трение скольжения трением качения. Кулачки и пружины могут ставиться или по отдельности, или в сочетании друг с другом, или с центробежным устройством. Рациональна комбинация кулачка с пружиной кручения, замыкающей кулачковую пару. В этом случае общее осевое усилие, создаваемое через кулачок как крутящим моментом М, проходящим через эту пару, так и пружиной, будет (158) Р М + Сф (Фо + Фх) где Сф - крутильная жесткость пружины, кгс-м/рад; фо - начальный угол закрутки пружины в положении ремня на наибольшем диаметре этого шкива; ф, = 2л --дополнительный J 2 / / if- Jl 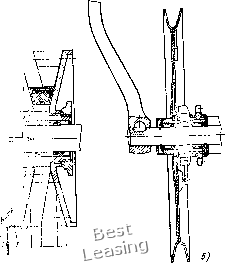 Рис. 92. Шкивы автоматического клиноременного вариатора мопеда фирмы Motobecan: а - ведущий; б - ведомый угол закрутки при смещении х\ Рк - шаг винтовой поверхности кулачка. Если в подобной комбинации пружина работает также и на сжатие, то полное осевое усилие, создаваемое этим устройством, М + Сф (Фо+Фл) F = * к. п Гк tg (р ± Рк) Fпр о nXi- (159) Обзор вариаторов мотосредств дан в работе [53]. Приведем некоторые конструкции. На рис. 92, а дана хорошо зарекомендовавшая себя конструкция вариатора мопеда фирмы Motobecan. Ведущий шкив выполнен с центробежным нажимным устройством / шарового типа. Диски шкива сидят па валу двигателя вхолостую и соединяются с ним двумя центробежными муфтами: колодочной 2, служащей для aaj пуска двигателя на ходу мопеда, и лепестковой 3, включающей вариатор по достижении валом двигателя определенной частоты 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 [ 25 ] 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 |