

|
|

|
Промышленный лизинг
Методички
волинейной образующей рассматриваются как конус с переменным углом. При качении одного конуса по другому с несовпадающими верщинами скорость по длине линии контакта ad изменяется на ведущем конусе с более длинной образующей по прямой от vl в точке а до у" в точке d, а на ведомом конусе с короткой образующей 4 - соответственно от V2 до vl. В точке о линии контакта, в полюсе качения, имеет место чистое качение, во всех остальных точках - качение со скольжением. Когда ведущим является длинный конус, на участке ао скольжение положительно, а на участке od - отрицательно. При ведущем коротком конусе скольжение имеет обратные знаки. При полном отсутствии нагрузок полюс качения о лежит вблизи середины линии контакта, так что моменты сил трения и f 2> возникающих на участках ао и od, относительно оси ведомого колеса уравновешиваются. При нагружении передачи полюс качения смещается. При этом сила трения F, развивающаяся на участке ао, играет положительную роль - ведет ведомый каток, сила же трения F, наоборот, тормозит его. Примем начало координат в середине контактной линии - точке с. Координату х к вершине конуса считаем положительной, от вершины - отрицательной. Координату полюса качения т вводим во все зависимости также со своим знаком: минус при смещении от середины к основанию конуса (см. рис. 104) и плюс при смещении полюса к вершине. Разность моментов сил трения F и 2 уравновешивает момент сопротивления на ведомом валу М2 = Fl Здесь sina2 Fl = qnf (4" ~ 2 = Qnf (4 rc = h Sin 9„ = . После подстановки и преобразований в общем виде М2= ± Qnf Sin «2 - 2m/2 - (165) Здесь и ниже во всех зависимостях верхние знаки при ведущем длинном и нижние при ведущем коротком конусе. Под УИг понимают полный момент сопротивления на ведомом валу, включая полезное сопротивление, а также трение в опорах ведомого вала и трение качения одного колеса по другому. Аналогично предыдущему разность моментов сил трения относительно ведущего вала дает момент на ведущем колесе: Мх = ±9„/sino:i (166) Момент на ведущем валу Mi больше момента на ведущем колесе на сумму моментов трения в опорах этого вала и трения качения колес. Пользуясь выражениями (165) и (166), можно вывести формулы для определения координаты полюса качения, а также передаточного отношения, момента и мощности трения при геометрическом скольжении и для определения КПД передачи. Из уравнения (165) координата полюса качения ~ Цп\ sin «2 (167) Для двух конусов с вершинами по разную сторону от рабочей зоны можно пользоваться теми же формулами с верхним знаком. Полюс смещается к вершине ведущего конуса. Принимаем, что окружная сила f приложена в полюсе качения; тогда момент сопротивления УИг = f ((Г2с - tn sin «2) = Ft {I2 - т) sin «2. Приравнивая это выражению (165) и учитывая, что Р Fnf qnbf (5 - р получаем с целью уменьшения скольжения bll берут возможно меньшим, поэтому членом с сомножителем {Ь/21) в формуле (168) можно пренебречь; тогда с достаточной точностью можно записать т-4-=Т-14-. (169) Зная положение полюса качения, можно определить действительное передаточное отношение фрикционной пары по формуле f\<s ric - ni Sinai sin ai /1 -m Знаки принимают так же, как и в формуле (167). Если нажатие f„ пропорционально нагрузке Ff (или М), то полюс качения занимает при всех режимах постоянное положение. В передачах, работающих с постоянным f„, полюскачения перемещается в зависимости от нагрузки. Для предельного случая, когда Ff = FJ и р = 1, координата т 0,5Ь, т. е. полюс качения находится на конце контактной линии. На другом ее Конце скорость геометрического скольжения v достигает максимального значения. При дальнейшем повышении нагрузки начинается общее проскальзывание - буксование. При перемещении полюса качения расчетные радиусы колес будут изменяться. Следовательно, в вариаторах с переменным FilP, передатбчнОб отношение изменяется с изменением нагрузки. Одной из наиболее важных характеристик фрикционных пар вариаторов является относительная скорость скольжения колес. Скорость v в произвольной точке g с координатой х (рис. 104) определяется разностью скоростей колес y,i и Уд2- Ул1 = (, -m Vx2 = e (x - m) Относительная скорость геометрического скольжения в общем случае 6 VcK е(х - т) ,,jc) Vo (/i-m)(/2-m) • > Наибольшая относительная скорость геометрического скольжения при смещении полюса качения на конец контактной линии, когда Ft = FJ, It max + (173) Величина скольжения возрастает с увеличением длины линии контакта и расстояния между вершинами конусов. При совпадении вершин конусы будут обкатываться без скольжения. При работе цилиндра по конусу относительное скольжение (174) - /-m • Знак плюс при ведущем цилиндре, минус -при ведущем конусе. Если вершины катящихся конусов расположены по разные стороны рабочего пояска, то аналогично предыдущему ? - е(х - т) ёг.- + " здесь е = 4 + k - расстояние между вершинами конусов. При данной координате т наибольшее относительное скольжение по (172), (174) и (175), будет при х = ;±й/2. Как при качении цилиндра по конусу, так и при качении двух конусов с вершинами, обращенными в разные стороны, величина скольжения значительно больше, чем при качении конусов с вершинами, лежащими по одну сторону рабочего пояска. При колесах с криволинейной образующей, но с линейным контактом имеется не один, а два полюса качения. Так, предположим, что точка Oi (рис. 105) представляет собой полюс качения. Соединим ее с точкой пересечения осей колес. Очевидно, что прямая 00 будет образующей исходных конусов, обкатывающихся один по другому без скольжения. Следовательно, и в точке пересечения этой прямой с образующей колес будет также чистое качение. При ведущем колесе 1 на участке линии контакта оо скольжение отрицательно, и здесь сила трения тормозит ведомое колесо. На участках ао и оф скольжение положительно, сила трения ведет ведомое колесо. При ведущем колесе 2 роль участков меняется. Положение полюсов качения зависит от нагрузки. По мере ее возрастания величина участков с отрицательным скольжением уменьшается, а с положительным - увеличивается; при ведущем колесе 1 полюсы качения сближаются, а при ведущем колесе 2 удаляются один от другого. Координаты полюсов качения находятся из рассмотрения условия равновесия ведомого колеса. С целью уменьшения геометрического скольжения длина линии контакта берется возможно мень- 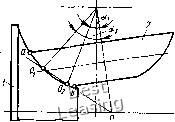 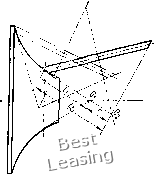 Рис. 105. Расположение полюсов качения в торовой передаче Рис. 106. Схема замены колес с криволинейными образующими коническими поверхностями шей. При этом один из полюсов качения может выйти за пределы контактной линии. С достаточной для практики точностью координату полюса качения и величину относительного скольжения для колес с криволинейными образующими можно находить по формулам, выведенным для случая качения двух конусов с несовпадающими вершинами. Для этого каждый участок рабочей поверхности криволинейных колес заменяется коническими поверхностями, касательными к ним по окружности, проходящей через середину линии контакта (рис. 106). С изменением относительного положения колес размеры конусов и условия скольжения будут меняться. Для отдельных положений вершины конусов могут совпадать, и пара будет работать почти без скольжения. Учитывая это, оценку величины скольжения для колес с криволинейными образующими следует производить для нескольких положений. В рационально сконструированной передаче максимальное значение относительной скорости геометрического скольжения может составлять для длительно работающих передач [при текстолите по стали или чугуну 1,5...%. При кратковременной работе допускают скольжение до 7 ... 10%. Для пар, работающих в масле, скольжение менее опасно. Это можно видеть на примере зубчатых пар, в которых наибольщее скольжение ~20%, и червячных, работающих со скольжением более 100%. Однако первые могут работать длительное время без износа. В червячных передачах имеет место износ, однако и в них скорость скольжения направлена в некоторых фазах зацепления почти по контактной линии, что значительно ухудщает условия их работы по сравнению с условиями работы фрикционной пары вариатора. Учитывая это, можно допускать для пар, работающих в масле, = 10 ... 20%. Для оценки возможного скольжения в проектируемой передаче и целесообразного назначения основных ее параметров удобнее относительное скольжение выражать через углы конусов 2ai и 2а2 и ф = lib. Соответственно этому формулу (172) можно преобразовать: £ Ь + 2т Г . /. sin ai ч+Ч 2(1-т) L \ sin аа / (176) здесь / - длина образующей короткого конуса до середины линии контакта; верхние знаки при ведущем длинном конусе, нижние - при ведущем коротком конусе. При использовании этой и приведенных ниже формул следует учитывать, что в ряде передач в различных положениях ведущий конус может быть то длинным, то коротким, и поэтому знаки будут меняться. Если воспользоваться приближенным выражением (169), то для оценки скольжения получаем Р 1+Р Г, /; sin CCl \ 2Рф ± 1 L \ -" sin аз / sin ai \±i (177) Когда известны а, а, Ф, из последней формулы можно установить предельное передаточное отнощение, при котором скольжение 1г лежит в заданных пределах пред > 2Рф ± 1 1+р +1 sin «2 sin «1 (178) При проектировании передачи целесообразно по выбранному предельному значению скольжения 1гшах и заданным передаточному отнощению tniax и углам конусов «1 и а.2 найти допускаемое ф. Для этого из (177) 1 +Р \ sin аз / . - . (179) sin аг / J J При колесах, касающихся одно другого по линии, под нагрузкой контакт распространяется на площадку некоторой щирины. Это обстоятельство в предыдущих выводах не учтено. В. А. Михайлова получила выражения для определения координаты полюса качения с учетом щирины полоски контакта. Как показало ее исследование, различия получаются весьма малыми, особенно если отнощение щирины полоски к ее длине меньще 0,25. Во фрикционных парах вариаторов с начальным касанием в точке контакт под нагрузкой распространяется на некоторую эллиптическую площадку. Поэтому парам с точечным контактом, так же как и парам с начальным контактом по линии, присущи геометрическое скольжение, связанные с последним потери и изменение передаточного отнощения с изменением нагрузки. Положение полюса качения о на эллиптической площадке контакта исследовали В. А. Щетников и В. А. Михайлова. В. А. Михайлова дала рещение задачи для случая, когда большая ось эллиптической площадки касания лежит в плоскости осей. Полюс качения находится на этой оси эллипса (рис. 107, а), и координата его определяется из уравнения 0,955 {ЦС,- sin Ft 1
 Рис. 107. Положение полюса качения и распределение скорости скольжения на площадке касания тел с начальным контактом: А - направление движения точечным (180) где а я b - меньшая и большая оси эллипса; - теоретический радиус ведомого колеса, определяемый начальной точкой касания. Переменные параметры Q и находятся численным интегрированием общего уравнения. Для практического решения составлены графики, позволяющие находить координату т в частях от оси b в зависимости от а/Ь, параметра b sin а2/2/-2 и величины, обратной запасу сцепления (рис. 108). Изменение скорости скольжения по площадке касания показано на рис. 107. Наибольшего значения скорость скольжения достигает на конце большей оси, наиболее удаленной от полюса. Полюс качения при р = 1 ... 1,2 может выходить за пределы площадки касания. Работа пары при этом остается устойчивой, но скорости скольжения возрастают. Чтобы полюс лежал в пределах пятна контакта, В. А. Михайлова рекомендует брать р > > 1,25. Следовательно, т„ах = 0,5й. На рис. 107, б показано положение полюса качения и распределение скоростей скольжения по пятну касания, когда оно вытянуто в направлении движения. Здесь большая часть составляющих элементарных сил трения направлена перпендикулярно направлению движения; они увеличивают потери и не используются для передачи нагруади. Условия образования жидкостного трения здесь также менее благоприятны. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 [ 29 ] 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 |