

|
|

|
Промышленный лизинг
Методички
При начальном контакте в точке с изменением нагрузки размеры пятна контакта изменяются. Следовательно, даже при постоянном FJF, положение полюса качения переменно и передаточное отношение будет изменяться. В большей степени оно будет изменяться при переменном FJF,. Действительное передаточное отношение /, наибольшая скорость скольжения Сектах И ОТНОСИТеЛЬНОС СКОЛЬЖеНИС г ПрИ
Рис. 108. Диаграмма для определения координаты т в паре с начальным точечным контактом: Ъ sin «г Ъ sin «в = 0,5; Ъ sin «2 = 0; 1 -alb =1,0; 2 -a/b = 0,75; 3 - a/b = 0.5; 4 -a/b = 0.25 начальном контакте в точке могут определяться по тем же формулам (170)-(173), что и для пар с линейным контактом. Также применимы здесь и зависимости (177)-(179). При этом для тел с криволинейной образующей углы и представляют собой углы при вершинах конусов, касательных к рабочим поверхностям по окружности качения. Под b здесь понимается ось эллипса контакта, расположенная в плоскости осей. з*« В предыдущих выводах принималось, что геометрическое скольжение имеется по всей длине линии контакта. В работе [10] показано, что в зоне, прилегающей к полюсу на участках, определяемых координатами -х и -{-х (рис. 104, б), касательные силы tdx не достигают величины силы трения fq„dx и коэффициент тяги • fqndx - fqn На этом участке - участке сцепления - будет лишь предварительное смещение и упругое скольжение. Геометрическое скольжение будет за пределами этого участка. Согласно [11] где а - ширина полоски контакта, определяемая по формуле Герца - Беляева; р =-{W2c ги cos «2 + Лас cos ai в среднем сечении полоски контакта. С использованием (172) имеем 4р е(х~ т) - приведенная кривизна X - т (181) fa (ii~m)(h - m) S где S = ± --Ui - tn){l2 - m) - расстояние границ участка упругого скольжения, для которого действительна формула (181), от полюса качения. Координаты этих границ . (2) = Si (2) + т. (182) Здесь координатьГ51 (2) и т вводятся со своим знаком. Возможны три случая: по обе стороны полюса имеются участки сцепления и геометрического скольжения; с одной стороны имеется только участок сцепления и по обе стороны полюса имеются только участки сцепления. В первом случае (см. рис. 104) х > -Ь/2 и лга < Ь/2. Из условия равновесия ведомого колеса имеем ь/2 X, Мг = J qnf {Г2с - X sin «2) bx \ qafx {Г2с - х sin «2) dx - X, Xl - q,if{hc - xina2)dx. -bl2 С учетом (181) для коэффициента тяги ф. после интегрирования и подстановки лг = S -- m и Ха = -S -- т получаем в общем виде Мг = ±qn! sin«2 (т" - 2m/2 -~+ ~) (183) Отсюда координата полюса качения qnf sin аа (184) 191 Ёез учета участков сЦепления {S = 0) зависимости (183) и (184) совпадают соответственно с (165) и (167). Во втором случае Хх < -Ь/2 момент на ведомом колесе 2 v S 2 i + 6 2 (183а) Координата т определяется решением данного уравнения. Третий случай имеет место при малой нагрузке и колесах из эластичных материалов. Здесь Xi<- Ь/2; Хз>Ь/2 и +6/2 М2 = 1 qnf-\px {Г2с - X sin «2) dx = -й/2 Координата полюса качения m = +- --- qj sin аз gJ6/2 Sin «2 12/2 b 12/0 (1836) (I84a) В процессе работы ряда фрикционных вариаторов наблюдается значительное изменение угловой скорости ведомой системы с изменением нагрузки даже при постоянном FJF и отсутствии перегрузки. Это объясняете?? тем, что в результате упругой деформации валов, опор и других деталей передачи взаимное положение колес изменяется с изменением нагрузки. Это приводит к смещению пятна касания и к изменению радиусов окружностей качения и передаточного отношения пары, т. е. вызывает кажущееся скольжение. Явление это весьма нежелательно, оно значительно искажает кинематику передачи и снижает жесткость ее характеристики, хотя дополнительной потери не вызывает. К ряду приводов с вариаторами предъявляется требование обеспечить строго неизменное передаточное отношение независимо от величины передаваемой нагрузки, т. е. требуется, чтобы вариатор обладал жесткой характеристикой. Из предыдущего следует, что в бесступенчатой фрикционной передаче нагрузка влияет на упругое, геометрическое скольжение и на деформацию деталей, смещающую пятно касания пары. Следовательно, для обеспечения постоянства передаточного числа при данном положении колес и изменении нагрузки необходимо: выполнять колеса из материалов с высоким модулем упругости; применять автоматическое нажатие, обеспечивающее постоянство Ff/F,; выполнять детали передачи, от деформации которых зависит положение пятна касания, возможно более жесткими; применять пары с начальным контактом по линии. 6.4. СИЛЫ И МОМЕНТЫ В ПЕРЕДАЧЕ На рис. 109 показаны силы, действующие в конической фрикционной паре при ее работе. Здесь Ff - окружная сила, f - радиальные силы и F - осевые составляющие силы нажатия f „. Под действием этих сил в подшипниках каждого вала возникают моменты трения / 2 (185) где = С---сумма результирующих радиальных реакций в опорах данного вала; /ц - коэффициент трения в подшипниках; d - диаметр цапфы; / - коэффициент трения во фрикционной паре. Коэффициент С зависит от расположения опор, угла конуса и радиуса колеса, а также от величин / и р. При многопоточных схемах валы и опоры могут быть частично или полностью разгружены от усилий. При наличии упорных подшипников момент трения в них для каждого вала M, = F,f„4. = Mlsina. 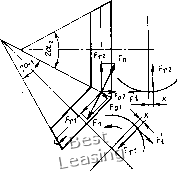 (186) Рис. 109. Силы, действующие на колеса При упорном шарикоподшипнике d„ - диаметр вала и /„ - приведенный коэффициент трения. Из условия равновесия ведомого колеса находим полный момент сопротивления на нем Л42=М2±,2+Мц2+Л4п2, где УИа - полезный момент сопротивления на ведомом валу. Верхний знак относится к случаю, когда ведомое колесо имеет внешнее касание, нижний - при внутреннем контакте. Заменив М его выражением из формулы (165), а Л4ц2 и М„2 из равенств (185) и (186), получим М2 = ±Ff (m - 2/2m - ) Т \ cos «2 - /ц2 Д /п2 dr, sln aaj. (187) -2 2 f Отсюда может быть найдена окружная сила Ff, если задан момент УИг на ведомом валу. Из условия равновесия ведущего колеса момент на ведущем валу верхний знак при наружном, нижний - при внутреннем контакте данного колеса. Аналогично предыдущему, с учетом выражений (166), (185) и (186) /п1 rfni- (188) / 2 / 2 Коэффициент трения качения k может быть принят: при стальных шлифованных колесах 0,005 см, при чугуне по чугуну 0,005 ... 0,01 см и при стали или чугуне по менее твердым материалам 0,015 см [82]. 6.5. ПОТЕРИ В ПЕРЕДАЧЕ И ЕЕ КПД Теряемая во фрикционных передачах мощность затрачивается: на трение по площадке касания от геометрического скольжения; упругое скольжение в пределах соответствующего участка; упругий гистерезис при перекатывании; трение в подшипниках; на сопротивление среду (масла, воздуха). Потери от упругого скольжения проявляются в комплексе с потерями от геометрического скольжения, так как те и другие являются составными частями одного общего процесса скольжения в передаче. В регулируемых фрикционных передачах наиболее существенными, превышающими все остальные виды потерь, являются потери на контактной полоске. С учетом наличия в пределах длины контакта участков геометрического и упругого скольжения (см. рис. 104) потери мощности на трение от этих видов скольжения составляют где Ni и Л/сз - потери мощности на геометрическое скольжение соответственно на участках положительного и отрицательного скольжения; yva - потери мощности на участке упругого скольжения. Приближенно потери могут быть выражены 6/2 X, ж, Лс = Qnhiriclxdx qnhxhlxdx+ J qnhiriXdx. -b/2 Используя для скольжения выражение (172) и для коэффициента тяги выражение (181), после интегрирования получаем зависимость для (кВт) Здесь линейные величины даны в сантиметрах. л/ - е sin «1 «" 10 200 6(/2 -т) (189) В случае, когда упругое скольжение простирается на всю длину контакта, т. е. xi < -Ь/2 и .;2 > Ь/2, то Лс= J qnhxiriclxdx. После интегрирования -6/2 е sin «1 10 200 S(/j-m) V" "12 / "I- ( Коэффициент полезного действия, учитывающий потери на (191) скольжение в пятне контакта, При начальном контакте в точке потери мощности на геометрическое скольжение, согласно исследованиям В. А. Михайловой, составляют 3,2 2fi 2А 2,0 г. с 20 400я bi±s\nai)A. Заменяя силу нажатия окружной силой и передаточное отношение его выражением из формулы (170), имеем
Pff be sin ai Лео,; (192) о 0,1 0,2 0,3 0,1 тlb Рис. 110. Коэффициент А для определения потери мощности в паре с начальным точечным контактом 20 400я /г ± m здесь Ь - большая ось эллипса касания; А - коэффициент, значение которого определяется из графика на рис. 110 в зависимости от т/Ь и а/Ь; остальные обозначения те же, что и для пары с линейным контактом. Потери мощности на геометрическое скольжение в парах с начальным контактом в точке меньше, чем в парах с касанием по линии. Потери мощности на трение в подшипниках Лд = Л4д1С01 -f Л4даС0а = [Суй + 4 ) . (193> Потери на трение (кВт) в подшипниках -(4,slna,-fHiip). (194> Лп = Mnii + Л4п2Ю2 = 20400 Потери мощности на гистерезис (кВт) при перекатывании д. ± Ffafeffla ((Di cos «i ± Ша cos «г) « 102-100 ~ 102.100 Заменив силу нажатия f„ окружной силой и угловую ско- рость ©2 через coi, получим FfMi » cos tti ± cos «а 10 200 / i (195> 195. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [ 30 ] 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 |