

|
|

|
Промышленный лизинг
Методички
ных случаях (рис. 112, в ... дас) один из валов должен перемещаться. С целью ограничения скольжения в крайних положениях и уменьшения габаритных размеров диапазон регулирования вариаторов с непосредственным контактом колес принимают равным 2,5 ... 3 и в крайнем случае в некоторых схемах равным 4 ... 5. В вариаторах с промежуточным элементом регулирование может производиться изменением: 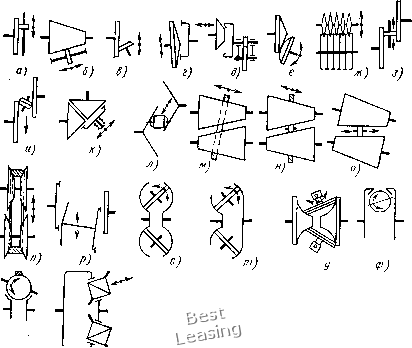 Рис. 112. Схемы фрикционных вариаторов диаметров обоих колес при неизменном диаметре промежуточного элемента-паразита (рис. 112, з ... п, с ... у); радиусов качения промежуточного элемента при постоянных диаметрах ведущего колеса и ведомого (рис. 112, ф... ц)\ радиусов одного из колес и одного из промежуточных элементов (рис. 112, р). Передачи последнего типа являются по существу двухступенчатыми. Наиболее отчетливо это видно из сравнения схем на рис. 112, г и р. Наличие в вариаторах с промежуточным элементом двух регулируемых колес позволяет расширить диапазон регулирования до Д = 6 ... 10. Кроме того, неизменность положения входного и выходного валов упрощает соединение вариатора .этого типа с сопряженными агрегатами. в большинстве случаев в вариаторах с промежуточным элементом применяются многопоточные передачи - с несколькими параллельно работающими такими элементами (рис. 112, с ... ц). С применением вспомогательных зубчатых пар могут быть выполнены многопоточными также передачи по схемам, показанным на рис. 112, 3, и, о. Передачи многопоточные при тех же габаритных размерах могут передавать большую мощность, и основные валы в них разгружены от радиальных сил. Однако при конструировании и выполнении этих передач важнейшим условием их работоспособности является обеспечение равномерного прижатия всех пар и высокая степень точности изготовления тел качения. Лобовые вариаторы с цилиндрическим роликом (рис. 112, а, з) имеют значительное геометрическое скольжение и потому нецелесообразны. Применяют их лишь во второстепенных передачах малой мощности, в частности в счетно-решающих устройствах. Более целесообразны передачи с коническими роликами (рис. 112, в и). Передачи, изображенные на рис. U2, б, м, н, о, при малых углах конусов дают меньшее скольжение, но имеют большие габаритные размеры. Из вариаторов без паразитных колес получили распространение передачи, показанные на рис. 112, г, д; они несложны в изготовлении и при малых значениях Д дают удовлетворительную характеристику по скольжению. Передачу, изображенную на рис. 112, е, применять нецелесообразно, так как расположение вершин конусов по разные стороны рабочего пояска обусловливает значительное скольжение; начальный контакт в точке ограничивает применение схемы передачами малой мощности. Многодисковые передачи (рис. 112, ж) имеют также значительное геометрическое скольжение. Однако возможность использования большого числа параллельно работающих дисков позволяет уменьшить длину линии контакта, снизить тем самым скольжение и одновременно значительно повысить передаваемую мощность. Передачи этого типа с парами, работающими в масле, выпускаются на гораздо большие мощности, чем передачи других типов. Передача с двумя парами раздвижных конусов (рис. 112, п) выполняется с самозатягивающимся кольцом. Она отличается значительным относительным скольжением, компактна, но работает с большими нагрузками на валы и опоры; КПД ее низкий. Передача требует тщательного изготовления. Получила ограниченное распространение в станкостроении. В вариаторах, выполненных по схемам на рис. 112, с ... у, рабочая поверхность колес торовая. Регулирование производится наклоном роликов. Соосное расположение валов создает конструктивные удобства и компактность передачи. Нажатие осуществляется автоматическим шариковым устройством. В передачах, показанных на рис. 112, с, т, ролик расположен по диаметру его сферической поверхности. Касательная к образующей ролика в средней точке линии контакта параллельна оси, так что ролик стано- вится аналогичным цилиндрическому катку. В связи с этим величина скольжения относительно велика. Передачи такого типа получили распространение при работе фрикционных пар в масле. В передаче, показанной на рис. 112, у, ролик расположен по хордальному сечению сферы; выбором соответствующих размеров передачи можно получить весьма малое скольжение. Недостатком всех торовых вариаторов является сложность изготовления колес. В шаровых вариаторах (рис. 112, ф, х) рабочие поверхности обоих колес конические; промежуточные элементы - шары.Регулировка скорости производится наклоном оси вращения шаров. Вариаторы отличаются значительным диапазоном регулирования, но вследствие точечного контакта в парах применимы при относительно небольшой мощности. Ввариаторах с коническими роликами (рис. 112, ц) начальный контакт линейный, благодаря чему их нагрузочная способность больше, чем шаровых. Все передачи с большим геометрическим скольжением, а также с начальным контактом в точке должны работать в масляной ванне. Из рассмотренных на рис. 112 передач хорошо работают беа смазки лишь торовые (рис. 112, у) и достаточно надежно передачи, изображенные на рис. 112, г, д, р. Для неответственных передач малой мощности иногда делают также сухими передачи, показанные на рис. 112, а ... в, е, 3, к; долговечность их низкая. Передачи, изображенные на рис. 112, д, м, н, п, относятся к типу самозатягивающихся; все они при ускорениях пробуксовывают. Передачи, показанные на рис. 112, г,/с, р и частично на рис. 112, ж, выполняются с нажатием пружинами. В них нажатие не зависит от нагрузки и поэтому им свойственны отмеченные выше недостатки подобного способа нажима. В остальных типах передач необходимое нажатие может быть осуществлено различными методами. При установке шарикового или винтового нажимного устройства на обоих валах передачу можно сделать непробуксовываемой при ускорениях, возникающих как на одном, так и на другом валу. Исключением являются передачи с одним цилиндрическим колесом (рис. 112, а, б), в которых на этом колесе подобное устройство установить нельзя. Условие постоянства запаса сцепления или постоянства Fi/Fny обусловливающее хорошую работу фрикционной пары на всех скоростных режимах, выраженное зависимостью (200), обеспечивается лишь в передачах, изображенных на рис. 112, ф, х. Достаточно хорошо оно соблюдается в передачах, показанных на рис. 112, у, ц. Во всех остальных передачах и при установке шарикового нажимного устройства постоянства этого отношения получить нельзя. Малое колебание отношения f f„ можно получить в самозатягивающихся передачах (рис. 112,"5, п). 6.8. УСИЛИЕ, НЕОБХОДИМОЕ ДЛЯ ПЕРЕВОДА РЕГУЛИРУЮЩЕГО ЭЛЕМЕНТА, И УСИЛИЕ САМОПЕРЕВОДА Вофрикционных вариаторах, применяющихся в общем машиностроении, ролики обычно переводятся специальным механическим приводом. В процессе перевода колеса или ролика, регулирующего скорость, из одного положения в другое необходимо приложить определенное усилие. Исследование, проведенное в ЦНИИТМАШе, показало, что усилие перевода может достигать весьма существенной величины. Поэтому знание] величины усилия перевода необходимо для расчета механизма регулирования скорости. Особенно это важно для случаев, когда процесс регулирования осуществляется автоматически. Рассмотрим методику определения усилия перевода на наиболее общем примере - паре конических колес с несовпадающими вершинами конусов. Результаты рассмотрения можно применить практически к любой фрикционной передаче, в том числе и с криволинейной образующей фрикционных тел. Так как в контактных зонах фрикционной бесступенчатой пары имеется геометрическое скольжение, то при перемещении ролика преодолеваетсяолько часть силы трения, действующей в]контакте. Однако и в этом случае усилие перевода регулирующего элемента достигает значительной величины. Скорость скольжения, направленная перпендикулярно линии контакта, изменяется по ее длине от Wck До «ск по прямолинейной зависимости (рис. ИЗ, а). Ведущий каток перемещается в сторону большего основания со скоростью v. Следовательно, в каждой точке линии контакта относительная скорость v элемента ведущего катка по отношению к ведомому представляет собой равнодействующую скоростей и (рис. 113, б). Сила трения на каждом элементе dF действует в направлении, обратном скорости V. Для того чтобы передвинуть данный элемент ведущего катка, необходимо преодолеть составляющую силу трения dPn. направленную по линии контакта. Последняя равна dP = dF Sin а, = sina Очевидно, что ctg = cк tcK аах> f ск шах Отсюда biBdx Полное усилие перевода l/(6ie)2 + jt;2 = Й1б In у (6,в)а +6f +6, 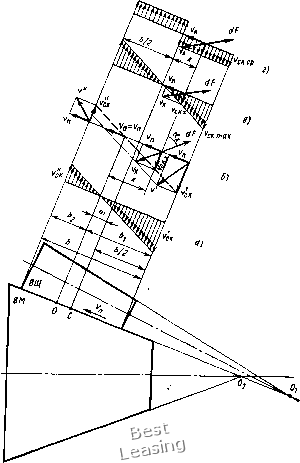 Рис. 113. Относительные скорости колес при переводе или, вынося bi и Ьа. а также подставляя % = bi/b получаем /n = „-eJn Л /1+В2 + 1 \ * \ /1 + (еХ)2 1 j (201) Из рис. ИЗ имеем: = 0,56 -f- m и ба = 0,56 - т. Координата полюса качения т и наибольшая скорость скольжения икшах определяются по формулам (167) и (171). По формуле (201) можно найти усилие перевода для фрикционных пар с прямолинейной линией контакта и с некоторым приближением для пар с криволинейными линиями контакта. Формула (201) достаточно точно отражает процесс взаимодействия фрикционных элементов при изменении передаточного числа. В работе [91 ] используется та же методика определения усилия перевода, но без учета смещения нескользящей точки относительно середины длины контактной полоски, т. е. при m = О (рис. 113, в). При таком упрощении усилие перевода выражается /n/n/Bln-L+J. (202) Далее в той же работе для упрощения переменная скорость геометрического скольжения заменяется постоянной, равной (рис. 113, г) ск. ср tcK max. при этом выражение для Р„ принимает вид (203) Из анализа формулы (203) видно, что сила сопротивления переводу ролика зависит от отношения скорости перевода к средней скорости геометрического скольжения. Чем больше скорость перевода, тем значительнее при прочих равных условиях усилие, необходимое для управления вариатором. Предельным значением Рп является величина FJ, которая может быть достигнута лишь при высоких скоростях перевода или в неработающей передаче. Приводимые в работе [91 ] расчеты усилий перевода роликов по зависимостям (202) и (203) показывают близкое совпадение результатов. Сопоставление этих данных с экспериментальными измерениями усилий перевода указывает на практически достаточную точность расчетов. Разница в усилиях, подсчитанных по приведенным формулам, и рассеяние экспериментальных точек оказались величинами одного порядка. Если в результате неточности сборки передачи либо вследствие деформаций валов, опор или корпуса передачи геометрические оси колес не пересекаются, а перекрещиваются в пространстве, то появляется составляющая скорости скольжения, направленная параллельно оси колеса. На рис. 114 изображены два конических колеса, касающиеся одно другого из-за перекоса осей в точке а. Так как скорости колес Wi и Wa в точке контакта направлены под. углом одна к другой, то проекция скорости на направление, перпендикулярное направлейию скорости v, создает скорость 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 [ 32 ] 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 |