

|
|

|
Промышленный лизинг
Методички
Глава 8 ПРИВОДЫ с ШИРОКИМ ДИАПАЗОНОМ РЕГУЛИРОВАНИЯ Вариаторы как с гибкой связью, так и фрикционные при регулировании одного шкива или колеса обеспечивают диапазон регулирования Д = 2 ... 4 и при двух регулируемых шкивах Д = 9 ... 10 (в отдельных случаях до 12). При больших диапазонах значительно ухудшаются их показатели: КПД, жесткость характеристики, тяговая способность. Во многих рабочих машинах требуется регулирование в значительно больших пределах. В некоторых случаях необходимо снижение угловой скорости ведомой системы до нуля и даже реверсирование. Увеличение диапазона регулирования может быть достигнуто применением: двухступенчатых вариаторов; планетарных вариаторов; вариаторов с зубчатыми передачами (переборами); замкнутых приводов с вариаторами в одной цепи и с замыканием дифференциалом. Приводы последнего типа могут использоваться также и в случаях, когда вариатор рассчитан на мощность, меньшую, чем необходимо для рабочей машины. Как показано в разд. 5.3 на примере клиноременных вариаторов, первый способ расширения диапазона регулирования не столь эффективен. При регулировании в каждой ступени одного шкива или колеса (см. рис. 90, 125 и 155) диапазон регулирования оказывается таким же, что и в одноступенчатой передаче с двумя регулируемыми шкивами. В то же время изменение окружной скорости в контакте и окружной силы происходит в значительно больших пределах, что не позволяет использовать вариатор в полной мере на всем диапазоне. В вариаторах с регулированием всех четырех колес или шкивов (см. рис. 87, 88) диапазон может быть расширен до 16 ... 20, однако в них изменение скорости и окружной силы происходит в еще больших пределах. Ступень, работающая в данный момент при меньшей скорости, оказывается тяжелонагруженной, в то время как другая недогружается. Это заставляет ограничивать применение двухступенчатых передач как по мощности, так и 286 ПО диапазону регулирования. Основные кинематические и силовые зависимости для них приведены в разд. 2.3 и 5.2; некоторые конструкции показаны на указанных выше рисунках. 8.1. ПЛАНЕТАРНЫЕ ВАРИАТОРЫ Использование планетарных схем в бесступенчатых передачах позволяет существенно расширить пределы регулирования скорости до значений, которые недостижимы в простых вариаторах. При этом некоторые схемы планетарных передач допускают и реверсирование. Благодаря применению планетарных схем с несколькими сателлитами габаритные размеры вариаторов могут быть значительно сокращены. -А -J -2 -Г гк-нс i"o 2k-hci">0 
-V -г ,iSt 1 -0,3k ;Г 7 0-7 -3 0,7t 0,20 0,31* Рис. 176. КПД передачи 2К-Н Рис. 175. Кинематические схемы и диаграммы передаточных отношений передачи 2К-Н Несмотря на многообразие форм тел качения и конструкций планетарных вариаторов, почти все их кинематические схемы можно свести к двум: двухступенчатым передачам 2К-Н и ЗК по терминологии В. Н. Кудрявцева [43]. Рассмотрим передачи 2К-Н. Кинематические схемы и характеристики их показаны на рис. 175, кривые КПД - на рис. 176. Диаграммы заимствованы из работы [43], по которой сохраняются и все обозначения. Регулируемым в этих передачах является один из сателлитов (чаще колесо /) или оба сателлита. Регулируемые элементы выполняются коническими или сферическими. Нерегулируемая пара может быть как фрикционной, так и зубчатой. Ведущим элементом могут быть центральное колесо а или водило Н. Колесо b - неподвижно. Передаточное отношение при ведущем колесе а будет ib = 1 = 1 ± ГЬ rgx где Гд, Гь - радиусы центральных колес; сателлитов, в общем случае * переменные. (243) радиусы в формуле (243) знак плюс при передаточном отношении простой передачи при < О, когда одно из центральных колес с внутренним, а второе с внешним контактом; знак минус - при > О, когда оба центральных колеса с одинаковым контактом. На рис. 179 передаточное отношение t, этих передач изображается наклонной прямой. Диапазон регулирования подобной передачи при регулировании одного сателлита / Д max /min ± /max (244) 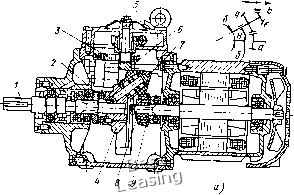 Рис. 177. Планетарный конусный вариатор фирмы S-Timpo Kogyo: а - разрез; б - кинематическая схема В вариаторах центральные колеса и сателлиты чаще всего делаются коническими. Нерегулируемые пары целесообразно выполнять с совпадающими вершинами конусов, что исключает геометрическое скольжение. В этом случае в формулы (243) и (244), так же как и во все последующие в этом разделе, для этих пар вместо отношения радиусов сопряженных колес следует подставлять отношение синусов половин углов при вершине конусов. Из формулы (244) видно, что при < О (в формуле - знак плюс) Д < , и большего диапазона регулирования получить нельзя. Передачи этого типа чаще применяются для достижения компактности и значительного редуцирования скорости; КПД их высокий (рис. 176). На рис. 177 показан планетарный конусный вариатор фирмы Shimpo Kogyo, выполненный по этой схеме. Фрикционные тела в нем работают в масле. Движение с ведущего солнечного конуса 8 передается ведомому валу / через двойные конические сателли- ты 7, оси которых закреплены в водиле 4. Невращающееся кольцо 6 может перемещаться в осевом направлении при помощи реечной передачи 3 и маховичка 5, чем и обеспечивается регулирование скорости. Нажатие осуществляется шариковым нажимным устройством 2, предварительное поджатие - пружинами 9. Угол наклона оси сателлитов к оси вала (рис. 177, б) б 35 ... ... 40°. Половина угла регулируемого конуса б. Во избежание геометрического скольжения в паре a-g углы и должны быть ctg «а = - cos б sin б и а„ = б - а„. Такие вариаторы изготовляют на мощность до 3,7 кВт при Д = 6. Нагрузочная характеристика наибольшего типоразмера вариатора: По, Об/мин................. 62 120 200 280 375 Mj, кгс-см ................ 475 1000 1360 1030 780 Вследствие значительного понижения отпадает надобность в установке последующих редукторов. Передаточное отношение в передаче 2К-Н с ведущим води-лом Н и неподвижным колесом b будет 1 -i 1 ± l-fxra (245) Как видно из формулы (245), в этой передаче можно получить регулирование скорости в очень широких пределах с остановкой ведомой системы (при = 1) и реверсированием. КПД вариатора и жесткость кинематической характеристики с приближением со к нулю резко падают. Передачи более выгодны в качестве кинематических, а не силовых. В вариаторах, допускающих снижение частоты вращения щ до нуля и реверсирование, кинематику следует характеризовать не диапазоном регулирования, а предельными передаточными отношениями. На рис. 178 показан конусный планетарный вариатор, выполненный по последней схеме. Передаточное отношение его D zg (245а) В вариаторе приняты числа зубьев Zg = 30; = 90 и предельные отношения Dld-y, = 2,4; Д rfnim = 3,33. При этом получается Vin = 5 и tluax = -9, следовательно, передача допускает реверсирование. Выполняется [ариатор на мощность N = 3,2 кВт при rti = 1500 об/мин. Прижатие конусов к кольцу достигается За счет центробежной силы конусов. Передача hpocta ilo кой-струкции. Вариаторы по схеме ЗК с тремя центральными колесами выполняются с двумя или тремя сателлитами (рис. 179, а и в). Ведущим является центральное колесо а, неподвижным - ко- 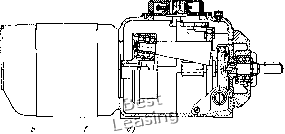  .Ufl7 Рис. 178. Планетарный конусный вариатор с ведущим води-лом: а - разрез; б - кинематическая схема лесо Ь; водило свободное, служит только опорой сателлитов и момента не передает. Эти передачи можно рассматривать [43] как состоящие из двух последовательно работающих передач 2К-Н (рис. 179 б и г). 1 н н а 1 н н Рис. 179. Кинематические схемы передач ЗК, применяемые в вариаторах: а, б - с двумя; в, г - с тремя сателлитами В первой ступени передача происходит от колеса а к водилу Н. Передаточное отношение ее определяется по формуле (243), в которую вместо rf следует подставлять для схемы на рис, 179, б и для схемы на рис. 179, г - г, знак - плюс. Здесь < 0.° Как видно из рис. 175 и 176, передаточное отношение этой ступени небольшое, КПД высокий. Во второй ступени передача осуществляется от водила Н к колесу е. Передаточное отношение определяется по формуле (245), в которой берется знак минус (i" > 0); колеса а и е, а также сателлиты fag меняются местами. Из рис. 175 следует, что эта ступень обладает широкими кинематическими возможностями со значительным редуцированием и реверсированием при i" = 1. Однако КПД передачи (см. рис. 176) резко падает. Эти свойства второй ступени распространяются и на всю передачу типа ЗК в целом. Передаточные отношения передач: при двух сателлитах (рис. 179, а) Га . (246) {Ь "а еЬ при Трех сателлитах (рис. 179, в) lb г/хГЬ ГеГНх (247) в вариаторах первой схемы регулируемым делается один сателлит /; диапазон регулирования Г /mm /max при трех сателлитах регулируются все сателлиты Ге / rf ГЬ \ rii /max ri, \ r/i /min Гд ГЬ \ rf, /min ГЬ \ rh /ma: (248) (249) Ниже рассматриваются конструкции трех вариаторов, выполненных по схеме ЗК. Вариатор Е. И. Пирожкова (рис. 180) представляет собой двухпоточный планетарный механизм с сателлитами, опирающимися друг на друга. Движение в нем от ведущих конусов /, имеющих осевую подвижность на ведущем валу 17, передается через сателлиты 2 солнечным кольцом , охватывающим правую и левую группы сателлитов; водило 14 свободно; снаружи сателлиты обкатываются по конусам 12, удерживаемым от поворота шариковыми нажимными устройствами 13. Конусы / связаны с ведущим валом 17 нажимными устройствами 15. Так как конус 12 неподвижен, то образующая ОБ сателлита является мгновенной осью его вращения. При контакте в точке Б кольцо будет иметь нулевую скорость вращения; во всех остальных точках контакта на образующей АВ линейные скорости сателлита и кольца будут пропорциональны расстоянию до точки Б. При контактировании на участке Л £ кольцо вращается в ту же сторону, что и конус /, при контакте на участке БВ - в обратную сторону. В точках А w Б скорости вращения наибольшие. 10* 291 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 [ 46 ] 47 48 49 50 51 |