

|
|

|
Промышленный лизинг
Методички
Передаточное отношение определяется зависимостью (246), при этом гь sinaj « гь sin аь cos (Р - gg) Га ~ sin аа ~~ cos (Р -Н ag) тогда COS (р -«g) cos(p+ ag) Таким образом, пгредача обеспечивает регулирование скорости в широком диапазоне с переходом через нуль в точке Б. По оси симметрии пра-h сателлиты соприка- саются с левыми и катятся один по другому без скольжения, будучи прижатыми силой Р. На ведущем полом валу 17 расположены две нажимные шайбы: левая сидит неподвижно, правая - свободно. Последняя связана штифтом с поршнем 16. Винтом 18 шайбы могут быть раздвинуты, чем обеспечивается выбор зазоров и предварительный натяг в передаче. В передаче используются два параллельно работающих планетарных механизма. Учитывая неизбежность погрешностей изготовления, съем мощности осуществляется не непосредственно с колец 11, а через конический дифференциал, включающий конические шестерни 4, три (или более) 6. 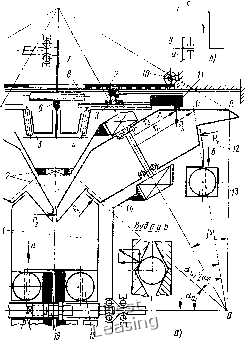 18 П Рис. 180. Схема планетарного сдвоенного вариатора конструкции Е. И. Пирожкова: а - конструктивная; б - кинематическая конических сателлита 5 и водило Использование конического дифференциала в качестве уравнительного механизма исключает возможность появления в передаче циркулирующей мощности. Водило 6 имеет зубчатый венец, движение с которого передается ведомой шестерне 7, сидящей на выходном валу. Регулирование скорости вращения ведомого вала осуществляется синхронным сближением или удалением колец при помощи механизма управления, состоящего из двух половин. Каждая половина включает поводок 3, кулачки которого перемещаются по трем пазам в цилиндре 8, зафиксированном относительно конуса вариатора. Охватывающий цилиндр 9 имеет на внутренней поверхности правую и левую нарезку, при помощи которой он навинчивается на выступающие кулачки поводка 3. Вращение цилиндра 9 осуществляется червяком 10. В другом варианте этого вариатора кольца 11 могут быть неподвижными, а конусы 12 - ведомыми. Форма и размеры сателлитов 2 выбраны так, что действующие на них силы Pi, Р2, р3 и Р обеспечивают их полное равновесие. Количество сателлитов в ряду определяется условиями соседства и должно быть не менее трех; рекомендуется его принимать равным шести. Исследование, проведенное Е. И. Пирожковым, показало, что угол конуса сателлита целесообразно принимать равным углу р наклона его оси. Это обеспечивает более надежную работу нажимного механизма, так как рабочие участки соответствующих опорных поверхностей правых и левых сателлитов оказываются параллельными. Кроме того, этот вариант обеспечивает передачу постоянной мощности на всем диапазоне регулирования. Реверсирование колец 11 в этом, случае утрачивается. К отличительным особенностям вариатора Е. И. Пирожкова следует отнести следующие. Благодаря уравновешенности сателлитов валы и подшипники этого вариатора полностью разгружены от нормальных контактных сил. Использование значительного количества сателлитов, расположенных в два ряда, позволяет существенно повысить передаваемую мощность при малых габаритных размерах вариатора. Вынесение контакта сателлитов с охватывающими их кольцами (в котором имеет место геометрическое скольжение) на наибольший радиус облегчает его работу. На площадках основного контакта сопрягаются поверхности с разными знаками кривизны и близкими радиусами кривизны, что благоприятно влияет на контактную выносливость поверхностей. Наличие сил инерции, отбрасывающих сателлиты на периферию, обеспечивает участие всех сателлитов в передаче крутящего момента. Недостатком вариатора является затруднительность эффективного отвода тепла, конструктивная сложность механизма отбора мощности от солнечных колец 11 и необходимость высокого класса точности изготовления. На рис. 181 показаны кинематическая схема и конструкция шарового планетарного вариатора. Здесь ведущим звеном является цилиндрическое колесо а. Оси сателлитов - шаров укреплены в свободно вращающемся водиле. Ведомым является колесо е. Шары обкатываются по непддвижному колесу Ь. Регулирование скорости осуществляется изменением угла у наклона осей шаров, при котором изменяются радиусы контактов шара с колесами а, b а е. Эти радиусы будут (рис. 181, в) rg = rcosy; Гй = rcos(a+Y); /"/ = /"cos (а±7), где г - радиус шара. 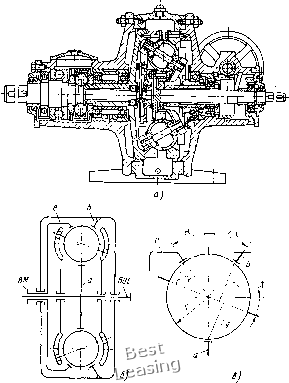 Рис. 181. Шаровой планетарный вариатор фирмы Escher-Wyss: а - разрез; б - кинематическая схема; в - радиусы качения шара Верхние знаки берутся при наклоне оси враш,ения шара из горизонтального положения по часовой стрелке, нижние - при обратном наклоне. Подставляя эти выражения в формулу (247), получаем зависимость для определения передаточного отношения . - sm а Ч rf / . Передача допускает реверсирование. На рис. 182 показан вариатор фирмы Shimpo Kogyo с фрикционными телами, работающими в масле, обеспечивающий реверсирование вращения выходного вала /. В этой конструкции на КбнЦе Входного вала 12 сидят два ролика 8, каждый из которых взаимодействует с конусами 4 и 10. Конусы 10 вращаются на неподвижных осях ; конусы 4 являются сателлитами; оси их закреплены в водиле 3, сидящем на выходном валу /. Конусы 4 и 10 охватываются вращающимся кольцом 5, которое может перемещаться в осевом направлении при помощи реечной пары 6, винтовой передачи 9 и маховичка. При симметричном положении кольца 5 относительно конусов 4 и 10 выходной вал останавливается. При перемещении кольца влево от зтого положения (как показано на рис. 182) выходной вал вращается в ту же сто- 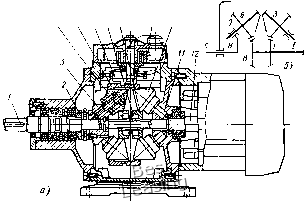 Рис. 182. Замкнутый конусный вариатор фирмы Shimpo Kogyo: а - разрез; б - кинематическая схема рону, ЧТО И ВХОДНОЙ вал, при смещении вправо - в обратную сторону. Прижатие катков осуществляется шариковым нажимным устройством 2, предварительное поджатие - пружинами 7, раздвигающими ролики 8. Наиболее крупный типоразмер такого вариатора имеет следующую характеристику: Противоположное 20 100 300 1050 600 280 Направление вращения валов Совпадающее щ, об/мин.............. 250 80 20 Мз, кгс-см ............. 300 700 1050 Вариатор выполнен по замкнутой схеме (рис. 182, б). Анализ его кинематики, КПД и распределения мощности дан в примере 2, раздел 8.3. 8.2. КОМБИНАЦИИ ВАРИАТОРОВ С НЕРЕГУЛИРУЕМЫМИ ПЕРЕДАЧАМИ (ПЕРЕБОРАМИ) Комбинирование вариаторов с несколькими нерегулируемыми парами в виде переборов досзтаточно эффективно. В зтом случае вариатор располагается в начале кинематической цепи, работает при больших угловых скоростях и используется на всём диапазоне при оптимальных режимах. Последующие зубчатые пары позволяют в зависимости от потребности снизить скорости вращения. Ступенчатым переключением нерегулируемых пар вариатор используется многократно и обеспечивает бесступенчатое регулирование на всем диапазоне изменения частот вращения ведомого вала привода. Пусть число ступеней т, общие передаточные числа их от вала вариатора до ведомого вала привода tl, ц, Для обеспе- чения непрерывности регулирования необходимо, чтобы наибольшая частота вращения ведомого вала привода на предыдущей ступени при полной нагрузке была не меньше наименьшей частоты вращения на следующей ступени при холостом ходе или "max h (1 ~l)== «min h> «2шах Ч (1 - I) == "mm h, где «шах. "mm - Предельные частоты вращения ведомого вала вариатора на холостом ходу; - падение угловой скорости при переходе от холостого хода до работы при полной нагрузке. Из предыдущего следует н = 1гД (1-1); /з = гД (1 -1) = нД (1 - If; 1,п-кД"-Ч-1Г-> (250) предельные частоты вращения ведомого вала привода лр min mln 1 пр max tl„ диапазон регулирования привода пр min (251) При заданном общем диапазоне Др и диапазоне регулирования Д имеющегося вариатора из формулы (251) можно найти необходимое число ступеней перебора т, а из формулы (250) передаточные отношения ступеней перебора. При применении простых переборов одновременно с переключением пар необходимо переводить вариатор из одного крайнего положения в другое. Это затрудняет переход с одного поддиапазона на другой. При переключении перебора происходит размыкание силовой цепи; непрерывность рабочего процесса, непрерывность регулирования нарушаются. Ф. В. Костиковым предложен ряд схем, обеспечивающих непрерывность регулирования при работе вариатора на оптимальном режиме [40]. В этих схемах (Авт. свид. № 109238) предусматривается двукратное использование вариатора двух видов: с перебором и изменением при переходе с одного поддиапазона на другой роли ведомого и ведущего шкивов вариатора на обратные; с включением на одном (высшем) поддиапазоне дифференциала с замыканием цепи. Пример первой схемы показан на рис. 183. В ней используется специально приспособленный торовый вариатор, в котором ведущий вал, связанный с валом двигателя Д, может муфтой Mi соединяться либо со шкивом Ti вариатора, либо со шкивом Гз-Левый выходной вал через клиноременную передачу di-d и муфту Ala приводит во вращение вал /, а правый полый вал вариатора через клиноременную передачу dg-d промежуточный вал , связанный с валом / передачей Zi-z и муфтой М. Диапазон регулирования ва- риатора Д = 4; передаточные отношения клиноременных передач t,i.n = 1, зубчатых пар z-Zi, z-Zg, z-z равны диапазону Д = 4; частота вращения вала двигателя Пд = = 1500 об/мин. На наивысшем поддиапазоне муфта Mi соединяет ведущий вал со шкивом Га; шкив Tl - ведомый; муфта Ala включена. Частота вращения вала /я,д. = 3000 ... 750 об/мин. В положении ролика Р, указанном на рис. 183 штриховой линией, вал / делает наивысшее число оборотов в минуту. По мере поворота ролика по часовой стрелке частота вращения уменьшается до tii = = 750 об/мин в его левом крайнем положении. В этот момент происходит автоматическое переключение на второй поддиапазон: муфта Ml включается на шкив Tj, который становится ведущим, включается муфта Мд и выключается муфта М. При дальнейшем обратном повороте ролика против часовой стрелки частота вращения вала / продолжает уменьшаться в пределах „ Dix ds Zl 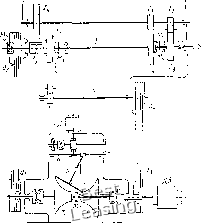 Рис. 183. Привод станка с расширенным диапазоном и непрерывным регулированием при двукратном использовании вариатора 750. .. 188 об/мин. Поворот ролика осуществляется серводвигателем СД через червячную передачу и барабан Б с замкнутой винтовой канавкой. Переход ролика от прямого хода на обратный производится без остановки при том же вращении вала серводвигателя. Подобное использование вариатора с диапазоном Д дает изменение вращения вала / с диапазоном Д. Применение перебора 2з-2б-Ze расширяет общий диапазон привода до Д*. В приводах подобных схем использование универсального вариатора исключено. Шкиды его должны сидеть на валах вхолостую и соединяться с ними рядом муфт. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 [ 47 ] 48 49 50 51 |