

|
|

|
Промышленный лизинг
Методички
в схеме на рис. 184 используется вариатор общего назначения. Здесь на низшем поддиапазоне вариатор Т-Т через клино-ременную передачу й-й с t = 1, пару z-z с i = j/Д приводит во вращение блок шестерен Z2-z и через муфту вал . При повороте ролика Р против часовой стрелки частота вращения вала увеличивается в пределах 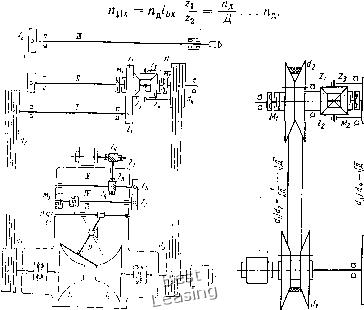 Рис. 184. Привод с расширенным диапазоном при повторном использовании вариатора и замыканием цепи дифференциалом Рис. 185. Привод с расширенным диапазоном, включающий клиноременный вариатор и дифференциал От ведущего вала движение одновременно передается через ременную передачу й-й с i = I на водило дифференциала с сателлитами zg и центральными колесами z, и z. На первом поддиапазоне колесо z и цепь dg-di-z вращаются вхолостую. По достижении «11;, = Пд муфта выключается, а муфта включается. При последующем обратном движении ролика Р по часовой стрелке частота вращения центральной шестерни z убывает от Пд до Пд/Д, а частота вращения шестерни z и вала возрастет от Пд до пиа = 2/гд - = Пд (2 - ) . Диапазон регулирования привода Дпр = 2Д-1. На высшем поддиапазоне происходит замыкание цепей d- di-H-zg-zi и zi-zs-z-z-d-di. В замкнутой цепи возникает циркулирующая мощность. Первая цепь da-d-H передает мощность, большую, чем развивает двигатель, но вариатор ока-298 зывается в более благоприятном режиме - передает меньшую мощность. Анализ зтого привода сделан в примере 1. На рис. 185 показан подобный привод с использованием клиноременного вариатора. Кинематическая схема здесь упрощается.
Рис. 186. Принципиальная схема замкнутого привода: Д - дифференциал; А и В - цепи привода; а и 6 - звенья дифференциала, соединенные с цепями А и В; I - ведущий, с - ведомый вал 8.3. ПРИВОДЫ С ЗАМКНУТОЙ КИНЕМАТИЧЕСКОЙ ЦЕПЬЮ В рассматриваемых приводах их ведущий вал / соединен с ведомым с одновременно двумя цепями А и В с замыканием их дифференциалом (рис. 186). Цепь А включает вариатор, обеспечивающий бесступенчатое регулирование скорости вращения ведомого вала с. Вторая цепь В, как правило, делается с постоянным передаточным отношением. В качестве замыкающего дифференциала в большинстве случаев используются передачи 2К-Н, в которых два звена а и b связаны соответственно с цепями А и В, а третье - с ведомым валом с. Дифференциалы могут быть как с цилиндрическими, так и с коническими шестернями или фрикционными колесами; ставиться они могут как на выходе, так и на входе. В этих приводах могут применяться как соосные вариаторы типа торовых, многодисковых, шаровых, так и с параллельными валами, в частности с раздвижными конусами - клиноременные, цепные. Весь привод может состоять из универсального вариатора с пристроенными к нему зубчатыми парами обеих цепей. Весьма удобны для такой комбинации цепные вариаторы. На рис. 187, а приведена схема подобного привода с использованием цепного вариатора с Д = 4. Регулирование производится от нуля до «гтах- Приводы ВЫПОЛНЯЮТСЯ СО следующими характеристиками: JV, кВт ..................... 0,75 3 7,5 15 «1, об/мин.................... 690 860 580 580 «гшах, об/мнн ................... 2070 1290 1740 870 Изменение момента и передаваемой мощности N но диапазону регулирования показано на рис. 187, б. Приведенная на рис. 182 передача Shimpo Kogyo представляет собой пример замкнутого привода, в котором все пары обеих цепей сделаны фрикционными и выполнены в виде одного агрегата. Общая теория замкнутых приводов рассмотрена В. Н. Кудрявцевым [43] и М. И. Ковальским [37], а также в специальной работе [44] Ю. Н. Кирдяшова. Ниже приводятся лишь основные Сведения, необходимые для оценки кинематики и силовых соотношений в таких приводах. Передаточное отношение замкнутого привода от вала с к валу / cг=-=-iJaxЛ%ьv (252) где ifo - передаточное отношение дифференциала от звена с к звену а при остановленной цепи В; {ь - то же, от звена с к звену b при остановленной цепи Л; tj и - передаточные отношения от звеньев а я b к валу /. с b а в -Л < гр 80 60 20 Рис. 187. Замкнутый привод фирмы Specon с цепным вариатором Обозначим для краткости передаточные отношения цепей Л и 5 л. = = fcVal;. и = Тогда уравнение (252) представится в виде ici = lAx + «в- (252а) Здесь передаточные отношения берутся со своими знаками: плюс при вращении конечных звеньев цепи в одну сторону, минус - при вращении их в разные стороны. Каждая цепь передает мощность [37] (253) (253а) где т], гв - КПД цепей А я В при остановленной другой цепи; г - КПД всего механизма, равный (254) В этих формулах при одинаковых знаках передаточных отношений ijx и tfi показатель при КПД берется +1; при разных знаках г. и этот показатель для цепи с меньшим передаточным отношением по абсолютной величине -1, для другой-- Диапазон регулирования привода Д cimax Лтах amin almln Н~ (255) Замкнутые бесступенчатые приводы по своим свойствам разделяются на два оновных класса [37]. К первому относятся приводы с одинаковым знаком передаточных отношений i и ig- Из анализа формул (252а) и (255) следует, что 1 для этих приводов имеет определенное значение и тот же знак, что и составляющие / и /д. Следовательно, большого редуцирования или реверсирования в этих приводах получить нельзя. Так как диапазон регулирования вариатора вав max вар rain al max al mm TO из зависимости (255) следует, что для приводов первого класса их диапазон регулирования Д„р < Д. Из формул (253) и (253а) видно, что мощности, передаваемые по цепям А я В, положительны, т. е. мощность от двигателя к ведомому валу идет по двум каналам. Вариатор в приводах этого класса работает в благоприятном силовом режиме - передает лишь часть мощности, определяемую зависимостью (253). Однако это приобретается ценой уменьшения диапазона регулирования. Подобные приводы целесообразно применять, когда требуется передать мощность большую, чем допустимо по вариатору, но достаточен меньший диапазон регулирования. В приводах второго класса передаточные отношения и Ib разного знака. Передаточное отношение привода имеет знак большего по абсолютной величине i и tg. Из рассмотрения формул (253) и (253а) следует, что в цепи, знак передаточного отношения которой противоположен знаку id, мощность отрицательна, т., е. передается от ведомого элемента к ведущему валу /. В другой цепи мощность оказывается больше подводимой. Таким образом, в приводах этого класса обязательно имеется циркулирующая мощность. Для разгрузки вариатора целесообразно, чтобы цепь А, включающая его, имела знак ij, обратный знаку i, и чтобы < Ni. Для этого согласно формуле (253) необходимо, чтобы 0> г>-1; после подстановки г\ из выражения (254) \AxЦAx\<,5 (256) Если передаточное отношение цепи А в каком-либо положении вариатора jij = \1в\, то = О, и ведомая система останавливается. При дальнейшем изменении передаточного отношения вариатора 1 меняет знак. Следовательно, приводы второго класса при определенных соотношениях i,. и допускают значительное редуцирование скорости с доведением ее до нуля и реверсированием. Из анализа формулы (254) следует, что при О КПД "Л О, а отношения мощностей N/N и N/Ni резко возрастают, что объясняется увеличением циркулирующей мощности. Таким образом, приводы второго класса обладают широкими кинематическими возможностями, но динамические их характеристики оказываются ухудшенными. Очевидно, эти приводы целесообразно применять в качестве кинематических и при небольшой мощности. Передачи этого класса [37] разделяются на три группы согласно табл. 24. При этом группа 3, в свою очередь, делится на три подгруппы. Как следует из табл. 24, при необходимости получения широкого диапазона регулирования с понижением частоты вращения ведомого вала до нуля могут быть использованы приводы групп 1 и 3-1. При этом во второй из них вариатор на части диапазона работает при мощности NJ-. < jV, в то время как в первой все время при > 1- При необходимости реверсирования применяют приводы группы 2. Приводы группы 3-3 можно применять для тех же целей, что и приводы первого класса: при использовании вариатора меньшей мощности в приводах на большую мощность, но в случае необходимости большего редуцирования. КПД их, однако, ниже, чем в приводах первого класса. Приводы этой группы могут быть также применены в случаях, когда необходимо получить очень жесткую кинематическую характеристику - при ограниченном диапазоне регулирования. Падение скорости под нагрузкой ft С -Vou и О) н а а ю о ° и (г, СП о Ч а. со * -сч се 2§ а § ю к а. С &« §Й о S ей а-S га о. со со « «е- л со 1" со >- ю S я о а. S Ссо о ю га сз хС о S>* ft s . <u со J3 с со л X о" Э га и й S „ я а. о. « к- с S J- со « S За»: <и g о g S о а. о. Сок CJ о. 03 t- я со со 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 [ 48 ] 49 50 51 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||