

|
|

|
Промышленный лизинг
Методички
в них тем меньше, чем меньшая часть мощности проходит через вариатор. Анализ такого привода дан в работе [84]. Приводы группы 3-3 применять вообще нецелесообразно. Кинематические схемы замкнутых приводов весьма разнообразны. Рассмотрение всех их не представляется возможным. Кинематические и динамические возможности подобных приводов могут быть оценены по формулам (252) ... (256). Последние применены также и к случаю, когда регулируются обе цепи (А и В). В качестве примера приводится анализ двух замкнутых приводов, рассмотренных выше. Пример 1. В схеме, показанной на рис. 184, на высшем поддиапазоне привод оказывается замкнутым. Цепь А состоит из вариатора - Гз, передачи rfi-da, зубчатой пары г-г, цепь В - из передачи 3-4. Звеном а является шестерня дифференциала г, звеном b - водило, звеном с - шестерня Z4. Примем: для клиноременных передач ( = 1, т] = 0,95; для зубчатой Za/zj = = Д, ц = 0,97; для вариатора д = 4, т1 = 0,94; КПД цепи А tia=0,97x Х0,95-0,94 = 0,87. Передаточные отношения 61 = 8/4 = I; при измепении передаточного отношения вариатора от (gap щах = = 2 до вар min = 1/1д = 0,5 остальные параметры изменяются в пределах lalx =--~- 1(-вар)=- = 1. . .0,25; Ax = faau = - 1 ... - 0,25; = л;. + в = 1 . . . 1.75; = 0,8. . .0,93; Передаточные отношения для цепи А с учетом формулы (245) 1 1 :В ,-8 ca-~> Г2 4 Лд; = сааи = - для цепи В = 1; о„ = ifi, -= я 8 = - я-5 гхйЛ-\-2,-/1,0 вХ>вЛ + 4,52,7 Передаточное отношение всего привода "Ах ГЬх - Гх Ux Вершины конусов 5 и б совмещены, поэтому переменные радиусы их e-v (с + ) sin a,,; rx = ih - ) sin «3,6. где /j, - длина образующей конусов 5 и б в среднем положении кольца 4-5\ к - перемещение кольца 4-5 из среднего положения (положительное влево и отрицательное вправо); - половина угла при вершине конусов 3 ц 6. Подставляя в формулы для передаточных отношений последние выражения для гх и rgx, получаем id--: It i с здесь Гс - радиусы контакта конусов 5 и б в среднем положении В вариаторе принято rjrc 4, для крайних положений 0,47. В табл. 25 приведен расчет характеристик передачи при данных соотношениях для пяти положений регулирующего кольца. В этом расчете КПД фрикционных пар условно принят постоянным и равным 0,9 для каждой пару. Как видно из расчета, знаки передаточных отношений разные и привод работает с цир- - 0,12; = 4J = 1,7...1,12. la % Как видно, знаки (av и (в разные, следовательно, привод работает с циркуляцией мощности. По цепи А мощность передается в обратном направлении - от дифференциала к двигателю. Циркулирующая мощность достигает наибольшего значения при (дтш, когда пцшш = "д- КПД при этом имеет наименьшее значение. Цепь fi передает мощность, на 70% превосходящую мощность двигателя. Привод относится к группе 3-3 второго класса. При диапазоне вариатора д = 4 диапазон регулирования привода = 1,75. с1 min Пример 2. Определить характеристики передачи Shimpo Kogyo (см. рис. 182). В передаче цепь А (см. рис. 182, б) состоит из фрикционной пары 1-2 с постоянным передаточным отношением ix 2 - 1 и регулируемой пары 3-4; цепь В - из одного центрального вала. В дифференциале звеном а является кольцо 5, звеном Ь - колесо 8 и звеном с - его водило Н. Один сателлит 6 регулируемый. При этом = г; - г,; r = Г5. Положения 25. Характеристики передачи для пятя положений регулирующего кольца 0.47 0,24 -0,12 -0,24 -0,47 -0,097 -0,145 -0,229 -0,260 -0,324 0,239 0,236 0,180 0,150 0,117 0,172 0,091 -0,049 -0,110 -0,2t)7 250 132 -71 -160 -300 tl по формуле (248) 1 по формуле (247) 0,90 0,76 0,47 0,65 0,73 1 по формуле (247а)
куляцией мощности. При движении кольца 4-5 из среднего положения влево перегружается цепь В, при перемещении вправо - цепь А. Привод допускает реверсирование, но КПД невысокий и в середине диапазона доходит до нуля при «2 = 0. Передача относится к группе 2 второго класса (см. табл. 24). 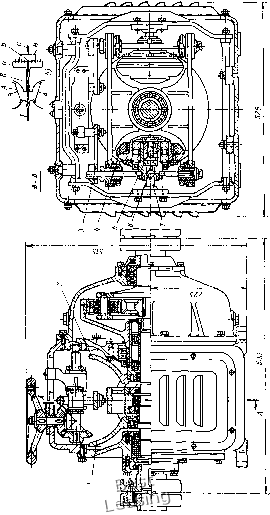 о. со Н си и; « с я 1Г) S Он Анализ схемы вариатора замкнутого типа с двумя клиновыми ремнями, предложенного в работе [36], дан в предыдущем издании [72]. На рис. 188, а представлена замкнутая передача, разработанная в РИСХМе [40 . Цепь А включает торовый вариатор и центральное колесо а дифференциала, цепь В - центральный вал и колесо b (рис. 188, б). При диапазоне регулирования вариатора Дв = 3 и выбранных соотношениях колес а и 6 дифференциала передаточное отношение привода изменяется в пределах id = -0,0508 ... -0,82, что дает Дпр = 16. При двигателе о. = 1470 об/мин частота вращения выходного вала = 75 ... 1200 об/мин. Если принять КПД зубчатой пары 0,98 и вариатора 0,95, то при регулировании от icimu ДО лшах основные параметры у\ = 0,58 ... 0,9; Л = = (4,71 ... 1,36) Л; Nb = -(3,71 ... 0,36) Л. Как видно, расширение диапазона регулирования с 3 до 16 с применением замкнутой схемы достигается за счет циркуляции мощности, значительной перегрузки вариатора, стоящего в цепи А и снижения КПД привода. Подобные передачи можно рекомендовать только для кинематических, а не силовых приводов. Особенностью самого торового вариатора по рис. 188 является жесткая фиксация чашек 1 и 2 в осевом направлении с нажатием со стороны роликов 4. Сила прижатия переменна и осуществляется за счет реактивных сил, действующих на рамку 3 с роликами 4 со стороны неподвижного кулачка 7, через шарик 6 и толкатель 5. Применяются замкнутые приводы и с тремя цепями, из которых одна с регулируемым передаточным отношением и две с постоянными. Кинематические и силовые возможности их шире, чем приводов с двумя цепями. Для замыкания цепей здесь устанавливаются два дифференциала. Однако приводы с тремя цепями конструктивно оказываются слол<ными. Глава 9 БЕССТУПЕНЧАТЫЕ ПРИВОДЫ С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ Автоматическое регулирование скоростного режима рабочей машины может иметь следующие цели: реализацию полной мощности двигателя при переменных параметрах рабочего технологического процесса; поддержание заданной угловой скорости при изменении нагрузки и условий работы; поддержание заданных технологических или рабочих параметров при изменяющихся условиях работы, в том числе поддержание заданной линейной скорости рабочего органа или изменение частоты вращения рабочего органа по заданной программе. Регулирование может осуществляться по одному или нескольким параметрам. В общем случае в автоматическую систему должны входить: датчик исходного параметра Д; устройство, задающее требуемую его величину, ЗУ; сравнивающее устройство СУ и управляющий механизм вариатора УМ. Сравнивающее устройство и управляющий механизм, помимо прямой связи СУ УМ, должны иметь и обратную связь УМ СУ, что придает большую устойчивость срабатывания системы. В зависимости от назначения автоматического регулирования задающее устройство ЗУ может быть стабилизирующим, служащим для поддержания заданного режима, программным - для изменения режима по заданной программе, и следящим - для изменения режима в зависимости от выполнения отдельных операций. Управляющий механизм УМ может приводиться в действие за счет внутренних сил самой системы привода или за счет внешнего источника - серводвигателя. В зависимости от вида связи Л-СУ-УМ системы регулирования могут быть механическими, электрическими, гидравлическими и пневматическими. В качестве примеров регулирования с использованием полной мощности двигателя можно назвать автомобили, универсальные станки и другое аналогичное оборудование. Здесь регулирование может производиться как по частоте вращения вала двигателя «х, изменяющейся при изменении нагрузки, так и по мощности дви- гателя или одновременно по и параметру нагрузки. Выбор той или иной схемы регулирования зависит от характеристики двигателя. При регулировании по щ принципиальная схема на рис. 189, а может быть осуществлена или электрической системой, включающей в качестве датчика Д тахогенератор, а в качестве сравнивающего устройства СУ - электронный регулятор, или механической системой (рис. 189, б), в которой датчиком является непосредственно ведущий вал вариатора, задающим устройством - 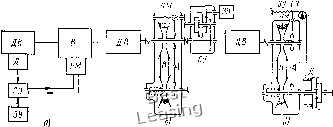 Рис. 189. Схема автоматического регулирования при реализации полной мощности двигателя: а - принципиальная (электрическая) схема регулирования; б ~ механическая система при регулировании по частоте вращения двигателя Пх\ в - механическая система при регулировании по мощности двигателя N синхронный двигатель и сравнивающим устройством - планетарная передача. На этих и последующих схемах, кроме приведенных выше обозначений, принято: Дв - двигатель, В - вариатор, РМ - рабочая машина. При регулировании по мощности N принципиальная схема остается той же, только в электрической схеме в качестве датчика может быть использован бесконтактный магнитный датчик мощности, а в механической системе (рис. 189, в) - одно звено планетарного механизма. Примером регулирования одновременно по двум параметрам - нагрузке и скорости - является автоматическое управление вариатором автомобиля DAF, описанного в разд. 5.3. Это управление не имеет специальных устройств автоматических систем, и для автоматического регулирования использовано свойство самого вариатора - определенная зависимость параметров его работы от соотношения осевых сил. На рис. 190 показаны схемы автоматического регулирования, используемые в случае необходимости поддержания заданной угловой скорости ведомого вала вариатора. При электрической схеме (рис. 190, а) датчиком исходного параметра является тахогенератор, устанавливаемый на выходном валу вариатора. В механической системе (рис. 190, б) датчиком служит выходной вал вариатора, задающим устройством - синхронизирующий двигатель, сравнивающим - планетарная передача. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 [ 49 ] 50 51 |