

|
|

|
Промышленный лизинг
Методички
На рис. 191, а показана принципиальная схема автоматического регулирования заданных технологических или рабочих параметров. Она может быть использована, например, для поддержания постоянной линейной скорости намотки рулонов бумаги, металлической ленты, проволоки, для поддержания постоянной скорости резания при торцовой обработке крупных деталей, для поддержания постоянства давления технологического пара 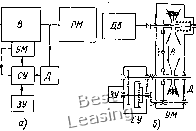 Рис. 190. Схемы автоматического регулирования для поддержания заданной угловой скорости: я - принципиальная (электрическая); б - механическая в трубопроводах и т. п. В каждо л из таких случаев должен применяться датчик по соответствующему параметру. На рис. 191, б изображено простейшее рычажное механическое устройство, обеспечивающее постоянство линейной скорости ма-  Рис. 191. Схемы автоматического регулирования для поддержания заданных технологических или рабочих параметров: я - принципиальная; 6 - механического регулирующего устройства, которое обеспечивает постоянство линейной скорости наматываемого иа барабан материала; / - ролик; 2 - барабан; 3 - тяга к механизму управления вариатора териала, наматываемого на барабан 2. С этой целью тяга 3 связана с механизмом регулирования вариатора и устанавливает нужную скорость вращения барабана в зависимости от диаметра намотки. На рис. 192 показана система автоматического поддержания постоянства заданной скорости резания при обработке деталей на токарном станке. Здесь требуемая скорость резания устанавливается задающим устройством ЗУ, датчик Д - по диаметру обработки. Задающее устройство и обратная связь соединены с сравнивающим устройством (соленоидом) при помощи реохордов. Соленоид в зависимости от знака результирующего напряжения выдает команду «Медленнее» или «Быстрее» на управляющий механизм вариатора, чем обеспечивается соответствие скорости вращения планшайбы обрабатываемому диаметру заготовки. На рис. 193 показана схема регулируемого привода к веретенному барабану 1 прядильной машины с автоматическим регулятором, служащим для поддержания постоянства скорости намотки нити. Регулятор состоит из управляющего гидроцилиндра 4 и следящего устройства, включающего золотник 5 и копир 6. Давление в гидросистеме создается насосом 7. При нейтральном положении штока 8 золотника сечения двух выходных отверстий одинаковы и поршень гидроцилиндра неподвижен. При смещении копиром штока золотника соотношение проходных сечений изменяется; на выходе золотника и в полостях гидроцилиндра создается разность давлений,что приводит к смещению поршня и изменению вариатором 2 частоты вращения барабана 1. Копир вращается от вала мотального эксцентрика. По завершении одного оборота копира, соответствующего двойному ходу кольцевой планки,направляющей нить, золотник смещается вдоль копира, что ведет к изменению частоты вращения барабана 1 в соответствии с изменением диаметра намотки. Первоначальная настройка регулятора на заданную скорость, необходимую для данного номера пряжи, производится перемещением гидроцилиндра 4 винтом 3. На рис. 194 приведена схема еще одного примера автоматического управления вариатором с целью поддержания заданных рабочих параметров (в Жданном случае автоматической подачи топлива в котельной). Задачей автоматического регулирования здесь является обеспечение в паропроводе постоянства давления пара при переменном расходе его на производственные нужды. При колебании давления пара, отведенного от паропровода 5 к сильфонуР регулятора нагрузки 6, приходит в движение рычажная система, связывающая сильфон с гидравлическим реле 10. В результате срабатывания реле происходит соответствующее перемещение поршня в гидравлическом сервоцилиндре 7, соединенном тягой с механизмом управлейия вариатором 3. Обратная связь (таховентилятор 8, мембрана обратной связи И) обеспечивает 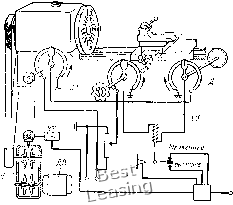 Рис. 192. Электрическая система автоматического регулирования скорости резания при обработке деталей на токарном станке плавность управления вариатором. При этом изменяется интенсивность подачи топлива из бункера 1 в топки котлов, что обеспечивает поддержание давления пара в главном паропроводе на заданном уровне. Если управляющий элемент УМ движется поступательно, то управляющее усилие может быть подведено к нему механически, гидравлически, пневматически или при помощи электромагнита. При этом скорость на выходном валу вариатора может устанавливаться в зависимости от результирующего действия двух или даже большего числа параметров. 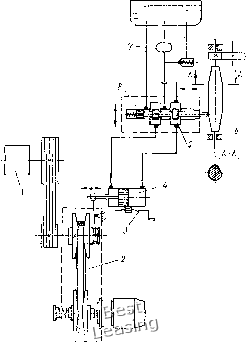 Рис. 193. Гидравлическая система автоматнче- Рис. 194. Схема автоматического регулирования скорости в приводе к ба- ского регулирования подачи рабану прядильной машины топлива в парокотельной На рис. 195 показаны некоторые более сложные варианты подведения импульсов к управляющему элементу, чем осуществленные простой жесткой механической связью. Так как в электрические могут быть преобразованы разнообразные импульсы (световые, тепловые, акустические, радио и пр.), то автоматизатор может быть применен для автоматизации самых разнообразных производственных процессов с использованием различных импульсов. При разработке систем автоматического регулирования вариаторов важно обеспечить линейный закон изменения частоты вращения выходного вала вариатора в функции перемещения регулирующего элемента. Обычно эта задача решается соответствующим профилированием кулачков. Применительно к весьма распространенным клиноременным и цепным вариаторам с симметричным регулированием, у которых изменение частоты вращения выходных валов осуществляется вращением винта регулирующего механизма, И. И. Рубинштейн [30] предлагает следующую методику получения исходных параметров для профилирования кулачков. а-=: Рис. 195. Способы подведения импульсов к управляющему штифту автоматизатора: а - через две пружины от двух суммирующих перемещений; б - при помощи электромагнита; в - от электромагнита с двумя обмотками для управления по двум параметрам; г - от сильфоиа; й - от мембраны в зависимости от давления газа или жидкости Закон изменения частоты вращения выходного вала вариатора в функции угла поворота винта описывается степенно-показательной функцией еп,ях-1-е \ "mm / Omax+e "min == е где Пх и пщ - соответственно текущее и минимальное значения частоты вращения выходного вала; 0 - угол поворота винта 0 = 0, при t = 1, 0 = +0„„ при Пту. и 0 = -0п,ах при Преобразовывая приведенную зависимость, получаем передаточное отношение в шах+6 Пх 1 1п Д «1 строим график После экспериментального определения 0 ix = / (0). Для линеаризации частоты вращения выходного вала через крайние точки полученной кривой с координатами i, Опах проводим прямую и затем строим профиль ш1п - " гаах кулачка, угол поворота которого прямо пропорционален частоте вращения выходного вала. Подробнее о линеаризации см. работу [30]. Использование линеаризирующего кулачка в механизме регулирования вариатора упрощает автоматизацию управления вариатором. список ЛИТЕРАТУРЫ 1. Аидреев А. В. Передачи трением. М., Машгиз, 1963, 110 с. 2. Артоболевский И. И., Зиновьев В. А., Умиов И. В. Уравнения движения машинного агрегата с вариатором. - В кн.: Механика машин. М., Наука, 1969, вып. 15-16, с. 75-80. 3. Бесступеичато-регулируемые передачи. Ярославский политехнический институт, вып. 1, 1976, 197 с; вып. 2, 1978, 183 с. 4. Бойко Л. С. Опыт применения многодисковых вариаторов в деревообрабатывающем оборудовании. - Вестник машиностроения, 1976, № 4, с. 35-36. 5. Верницкий В. В. Силовые параметры клиноременных передач с учетом упругих характеристик ремня и режимов его работы. -• В кн.: Бесступенчато-регулируемые передачи. Ярославский политехнический институт, 1978, вып. 2, с. 40-46. 6. Верницкий В. В., Мартынов В. К- Оценка изгибной жесткости клиновых ремней. - Механика, 1977, № 6, 169 с. 7. Вирабов Р. В. Качение упругого колеса по жесткому основанию. - Известия вузов. Машиностроение, 1967, № 4, с. 78-84. 8. Вирабов Р. В. О реализации касательной силы в зоне контакта упругих тел при качении. - Машиноведение, 1967, № 2, с. 93-106. 9. Вирабов Р. В. Скольжение в плоскоременной передаче. - Машиноведение 1967, № 4, с. 43-51. 10. Вирабов Р. В., Петрова Т. М, Геометрическое скольжение во фрикционных передачах с эластичным телом. - В кн.: Передаточные механизмы. М., Машиностроение, 1971, с. 249-255. 11. Вирабов Р. В., Петрова Т. М. Тяговые свойства фрикционных передач с эластичным телом. - Вестник машиностроения, 1969, № 11, с. 18-21. 12. Воробьев И. И. Вариаторы с широким клиновым ремнем./Руководящие материалы ЭНИМСа. М., 1963, 45 с. 13. Воробьев И. И. Передачи с гибкой связью в приводах станков. М., Машиностроение, 1971, 143 с. 14. ВульфсонД. Л., Рубинштейн И. И. Механический привод с бесступенчатым изменением скорости и автоматическим регулированием. - В кн.: Оборудование для промышленности строительных материалов. Л., 1962, вып. 5, с. 49-55. 15. Галаджев Р. С. Исследование деформации и скольжения клиновых ремней сельхозмашин. Автореферат диссертации на соискание ученой степени канд. техн. наук. Новочеркасск, НИИ, 1965, с. 31-34. 16. Галаджаев Р. С. Исследование деформаций клиновидного ремня методом электротензометрирования./Труды НПИ. Новочеркасск, 1964, т. 153, с. 35-42. 17. Галаджаев Р. С. Определение осевых усилий, действующих на шкив со стороны клинового ремня./Труды НПИ. Новочеркасск, 1963, т. 149, с. 105-111. 18. Галаджаев Р. С, Кочетов В. А., Савинков М. В. Исследование технологических погрешностей клиноременных передач сельскохозяйственных машин и их влияние на долговечность./Труды НПИ, Новочеркасск, 1964, т. 153, с. 7-11. 19. Галаджаев Р. С, Савенков М. В., Ровенков Е. Д. Уравнение совместности деформаций участков контура ремия и его использование для силового анализа передачи. - В кн.: Бесступенчато-регулируемые передачи. Ярославский политехнический институт, 1978, вып. 2, с. 35-39. 20. Герберт В. Распределение растягивающих напряжений в корде клиновидных ремней. - Труды американского общества инженеров-механиков, 1977, № 1, с. 16-24. 21. Герберт В. Потери мощности и оптимальное натяжение ремней в клиноременных передачах. - Труды американского общества инженеров-механиков, 1974, № 3, с. 93-101. 22. Гервас К- И. К определению механических характеристик клиновых ремней при изгибе. - Каучук и резина, 1967, № 2, с. 13-15. 23. Гервас К. И., Иронии Б. А. К расчету КПД клиноременных передач. - Вестник машиностроения, 1967, № 3, с. 27-30. 24. Гринбейн Э. Р., Бойко Л. С, Ревков Г. А. Расчет и профилирование кулачков нажимного механизма многодисковых вариаторов. - Вестник машиностроения, 1973, № 1, с. 10-12. 25. Гринбейн Э. Р., Бойко Л. С, Ревков Г. А. Расчет и профилирование ролико-кулачкового нажимного механизма многодисковых вариаторов. - Вестник машиностроения, 1973, № 9, с. 29-31. 26. Гутьяр Е. М. Натяжение ветвей ремня в клиноремешюй передаче при постоянном и изменяющемся расстоянии между шкивами. /Сб. научных работ. М., Сельскохоз. академ. им. Тимирязева, 1961, т. 13, с. 25-33. 27. Гутьяр Е. М., Александрова И. Ф. Углы схода и выхода клинового ремня. - Доклады МИИСП, 1971, т. VII, вып. 5, с. 51-58. 28. Дроздов Ю. Н., Данилов В. Д. Коэффициенты трения для фрикционных передач, работающих со смазкой. - В кн.: Передаточные механизмы. М., Машиностроение, 1966, с. 86-92. 29. Дроздов Ю. Н., Ромашкии О. Г. Режим смазки фрикционной бесступенчатой передачи. - Вестник машиностроения, 1977, № 10, с. 34-37. 30. Есипенко Я. И., Рубинштейн И. И. Цепные вариаторы. Киев, Техника, 1977, 149 с. , 31. Жуковский Н. Е. О скольжении ремня на шкивах. М., ОНТИ, 1937, т. 8, с. 19-21. 32. Засов В. В. Влияние растяжения центрального слоя гибкого колеса на передаточное число волновой фрикционной передачи. - В кн.: Бесступенчато-регулируемые передачи. Ярославский политехнический институт. 1976, вып. 1, с. 166-169. 33. Засов В. В. Разработка конструкции и исследование волнового, фрикционного вариатора. - В кн.: Передаточные механизмы. М., Машиностроение, 1971, с. 296-301. 34. Иванов Б. Н. Экспериментальное исследование клиноременных вариаторов. - В кн.: Конструирование и технология машиностроения. М.- Киев, Машгиз, 1961, с. 18-23. 35. Исследование деформаций и усилий в клииоременном контуре. - В кн.: Бесступенчато-регулируемые передачи/Галаджев Р. С, Ровенков Е. Д., Игна-тенко Ю. Д., Савинков М. В. Ярославский политехнический институт, 1976, вып. 1, с. 33-37. 36. Ковалев П. А., Мальцев В. Ф. Дифференциально-планетарный вариатор. - В кн.: Передаточные механизмы. М., Машиностроение, 1966, с. 163-171. 37. Ковальский М. И. Замкнутые планетарные фрикционные вариаторы. - Вестник машиностроения, 1962, № 11, с. 22-27. 38. Кодиир Д. С. Контактно-гидроднна.мическая теория смазки. Куйбышев, Книжное издательство, 1963, 184 с. 39. Костиков Ф. В. Определение оптимальных параметров торового вариатора. - В кн.: Бесступенчато-регулируемые передачи. Ярославский политехнический институт, 1976, вып. 1, с. 177-181. 40. Костиков Ф, В. Увеличение диапазона регулирования скорости механических бесступенчатых передач. - В кн.: Передаточные механизмы. М., Машгиз, 1963, с. 15-28. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 [ 50 ] 51 |