

|
|

|
Промышленный лизинг
Методички
Коэффициент, учитывающий влияние центробежных сил, 4Ср cos2 у К = 7-rh--2- (40) Сд + 4Ср cos у Усилие, действующее на вал на холостом ходу, f; = 2f;coSY = 2f;sin- = 2[fo-(l -K)fjsin--; (41) в положении покоя fao = 2foSln. (41а) 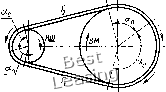 Рис. 24. Положение дуг сцепле ния ап и скольжения Величина К зависит от способа натяжения и относительной жесткости ремня и деталей передачи. В передачах с автоматическим натяжением К = 1; здесь натяжение ремней увеличивается на полную величину fц, что повышает общее напряжение в ремне и снижает его долговечность. Усилие прижатия обусловлено только предварительным натяжением Fq и не зависит от центробежных сил. В передаче с деталями большой жесткости и малой жесткостью ремня К -> 0; усилие прижатия ремня к шкивам убывает с возрастанием центробежных сил пропорционально fo = /хол - F,. В передачах, в которых существенное значение имеет провисание, усилие прижатия уменьшается медленнее, чем в предыдущем случае. В клиноременных вариаторах натяжение ремня преимущественно создается пружиной. 2го снижает жесткость Со и К -> 1; передача по своим свойствам приближается к передаче с автоматическим натяжением. Взаимодействие ремня со шкивом при работе под нагрузкой определяется характером их относительного движения. При нагружении передачи натяжение ведущей ветви увеличивается до fl, ведомой уменьшается до (рис. 24). В процессе обегания ведущего шкива натяжение ремня падает от F до F, элементы ремня укорачиваются и отстают от шкива, скользя по его поверхности. На ведомом шкиве натяжение ремня увеличивается от fa до fl, элементы ремня удлиняются и опережают шкив. Возникающее при этом скольжение, называемое упругим, происходит лишь на части дуги обхвата - дуге скольжения (рис. 24); в месте набегания на дуге покоя (сцепления) а„ ремень движется со шкивом без скольжения [31]. Помимо этого, при передаче усилия на шкивах ремень претерпевает еще деформации сдвига, однако они не вызывают отно- сительного перемещения ремня по шкивам. Для рассмотрения взаимодействия ремня со шкивом угол обхвата можно разделить на следующие участки: начальную часть дуги сцепления ап - дугу входа ап с радиальным перемещением элементов ремня в результате его сжатия при входе в канавку, сила трения на ремне здесь направлена в радиальной плоскости от центра шкива (рис. 25, б); вторую часть а," дуги сцепления без какого-либо перемещения ремня по шкиву; 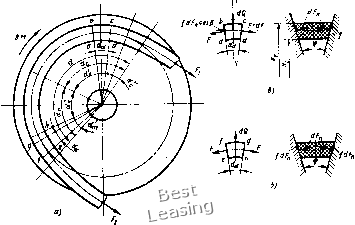 Рис. 25. Схема взаимодействия ремня с ведомым шкивом: а - положение дуг сцепления и скольжения а; б - усилия на элементе ремня на дуге а; в - то же, на дуге основную часть ас дуги скольжения а с тангенциальным скольжением и непрерывно изменяющимся натяжением ремня; конечную часть дуги скольжения - дугу выхода al, на которой имеет место тангенциальное скольжение и перемещение ремня от цет1тра шкива. На дуге входа ремень располагается по спирали. Длина ее отрезка больше длины дуги, по которой расположится ремень после полного входа в канавку. Поэтому ремень при входе имеет некоторые тангенциальные перемещения против движения. Как показали исследования Ю. М. Мартыхина [55], эти перемещения незначительны и ими можно пренебречь. На дуге скольжения ас ведущего шкива вследствие уменьшения натяжения ремня можно было бы ожидать перемещения его к периферии шкива, однако из-за заклинивания ремня этого не происходит. На этой же дуге ас ведомого шкива ремень при увеличивающемся натяжении перемещается к центру шкива. Такое поведение ремня на дугах ап и ас установлено в опытах Р. G. Галаджева [16], М. И. Горелика и полностью подтверждается диаграммой радикальных перемеще- НИИ ремня на обоих шкивах (рис. 26), полученной Ю. М. Марты-хиным [55]. Таким образом, тяговая способность определяется преимущественно взаимодействием ремня со шкивом на дугах скольжения. При дальнейшем рассмотрении примем дугу скольжения как единую, пренебрегая радиальной составляющей силы трения на дуге выхода ас. Это допущение несколько завышает тяговую способность передачи. В общем случае на дугах скольжения на каждый элемент ремня действуют натяжения f и f + af, нормальные силы dFj со стороны шкива и центробежная сила dQ. На дуге скольжения ведомого шкива на элементе abed (см. рис. 25, а, в) сила трения fdF„ направлена на рабочей поверхности под углом Р к касательной. Взяв сумму проекции сил на ось уу, получим при наличии Z ремней  < I  [f H-(fH-df)] Sin -dQiZ-2zdF sin - - 2zfdFn sinpcos-- = 0. 700 ко a* Рис. 26. Диаграмма радиальных перемещений ремни на дугах обхвата: / - ведущего; 2 - ведомого шкивов Подставляя сюда выражение для dQi из (37) и пренебрегая бесконечно малыми второго порядка, имеем dF,= ----r-da = 2г sin -- + / sinp cos-- 23(sin-b/.cos-f) (42) Приращение dF силы натяжения компенсируется тангенциальной составляющей силы трения, т. е. dF = 2zf dFn cosp = 2zft dF„. (42a) Здесь ft и /г - частные коэффициенты трения, определяющие составляющие силы трения, причем = /cosp = f: /, = /sinp==/. где Vl - скорость тангенциального скольжения; - скорость радиального перемещения ремня. Решая совместно выражения (42) и (42а), имеем dF /cos р. / sin р cos Угол Р на ведомом шкиве изменяется от 90° в начале дуги скольжения до величины, близкой к нулю в конце. Для упрощения решения принимаем его постоянным и равным среднему его значению [20]. На дуге скольжения ведущего шкива радиального перемещения нет, поэтому р = О, = О и = /. Распространяя зависимость (43) на оба шкива, имеем j=fda. (43а) Здесь / - приведенный коэффициент трения: для ведомого шкива /cosp ft ф , I Q ф • ф , I ф sm + / sm р cos sm + cos для ведущего шкива (44) (45) Интегрируя правую часть уравнения (43а) в пределах дуги скольжения а,., а левую от f 2 До Fi, получаем формулу Эйлера = е = m, (46) где m = e = e В предельном случае без учета тангенциальных деформаций а. = = а. Текущее значение натяжения ремня в сечении, определяемом углом от начала дуги скольжения. F-F = {F-F)e (47) Изменение угла р по дуге скольжения зависит от поперечных деформаций, в свою очередь определяемых изменением растягивающей силы. Решение уравнения (43) с учетом поперечной податливости ремня дано В. Л. Черновым [93]. Однако полученные им зависимости дают результаты, не согласующиеся с опытами. В работе [73] дано более приемлемое решение, при котором принято, что ремень, перемещаясь в радиальном направлении, располагается на шкиве по логарифмической или архимедовой спирали. При этом текущее значение угла р определяется зависимостью ctg Р = ад,. Площадь рабочей поверхности элемента abed (см. рис. 25, в) , р2 „2 COS~ где Rl и Rl - радиусы расположения наружной и внутренней поверхностей ремня. Тогда давление на рабочей поверхности на дуге скольжения ведомого шкива с учетом (42) dFn dS K-«?)(tg+/.) .Z)./.(tg-f+/,) ; (48) на дуге скольжения ведущего шкива (49) В формулы (48) и (49) входит натяжение F в любом сечении ремня. Очевидно, давление на дугах изменяется пропорционально натяжению. На дугах входа обоих шкивов «„ имеется только радиальное перемещение (см. рис. 25, б), поэтому/ = /, и давление в конце дуги входа Pi (2) = 1 (2) - (2)(tg !-+/) (50) на второй части а„ дуги сцепления скольжения нет, и Pi (2) = 1 (2) --ц (2)fttg-- (51) В этих формулах для ведущего шкива вводится Fi и Di, для ведомого Fa и D. Коэффициент трения / в клиноременных передачах по данным опытов при работе на чугунных и стальных шкивах и ремнях с оберткой колеблется в пределах 0,34 ... 0,4, при ремнях без обертки 0,5 ... 0,62. Для расчетов можно принимать в первом случае / = 0,35 и во втором / = 0,5. Во всех предыдущих зависимостях F, F, F - полные силы натяжения с учетом действия центробежных сил. Окружная сила, передаваемая ремнем, будет F, = - F,. (52) Решая совместно (46) и (52), находим Рг-=Р+Р,; Fa = F, + F,. Тяговая способность характеризуется окружной силой или коэффициентом тяги Ft Px + F m - l (53a) (54) где F; = Fl - F и F; = Fa свободные силы натяжения ветвей, используемые для передачи нагрузки. Сила, действующая на вал, Fa = 1 + Fl + 2F1F2 cos (180 - а) - (1 - К) F sin -f -. (55) Для установления связи натяжений на холостом ходу и при работе передачи обычно используют уравнение Понселе; fi + f2 = 2F,„„. (56) Пользуясь выражениями (39), (53) и (56), получаем величину предварительного натяжения, обеспечивающего передачу данной окружной силы, F,=iF,+F,)-KF,==- + (l-K)F, (57) и из выражений (39), (52) и (56) натяжения ветвей Fi=F, + --KFu и Fa = F„-4 + KF,. (58) Испытания ременных передач на тяговую способность принято вести при одном плавающем вале и автоматическом натяжении ремня грузом. В этом случае К = 1, и из зависимости (57) Fl + F2 - 2F f; + F; = 2Fo. (56a) Коэффициент тяги для такой передачи г; = 2F„ • (54а) Как показали опыты автора [66] и более поздние работы [16, 51, 97] и др., при закрепленных валах сумма натяжений ветвей не остается постоянной, а повышается с увеличением нагрузки передачи. Коэффициент тяги, определяемый по формуле (54а), может достичь значения 1,5 ... 2,0, тогда как по смыслу ар < 1. Следовательно, зависимость Понселе и производные формулы (57), (58) и (56а) при закрепленных валах неточны. Повышение суммы натяжений (Fi + Fg) с увеличением нагрузки создает 0 1 2 3 4 5 6 7 [ 8 ] 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 |