

|
|

|
Промышленный лизинг
Методички
резерв нагрузочной способности, а для передачи данной нагрузки позволяет уменьшить предварительное натяжение против значений, определяемых зависимостью (57). Зависимость Понселе получена в предположениях: контур ремня имеет теоретическую форму, представленную на рис. 4, длина ремня при нагружении его остается неизменной - натяжения Fl и /3 распространяются каждое на половину длины ремня, и удлинение ведущей ветви под нагрузкой равно укорочению ведомой. В действительности натяжения /1 и /3 с определенным допущением распространяются только на дуги сцепления, на дугах скольжения деформации растяжения переменны. Вследствие различия длин этих дуг на обоих шкивах и изменения их при нагружении передачи суммарная деформация ремня не остается неизменной. При наличии изгибной жесткости ремня свободные ветви его непрямолинейны, и контур принимает форму, изображенную на рис. 27. По мере нагружения передачи отклонение ведущей ветви от прямолинейной уменьшается, а ведомой - увеличивается. Все это приводит к увеличению суммы натяжений ветвей с ростом нагрузки. На натяжение ветвей также влияет податливость валов и опор, а в клиноременной передаче - изме-нениезаглубления ремня в канавки шкивов при изменении нагрузки. Из-за изгибной жесткости ремня точки набегания и сбега ветвей отклоняются от своего теоретического положения (рис. 27) на углы жесткости 6, определяемые [69] по формуле 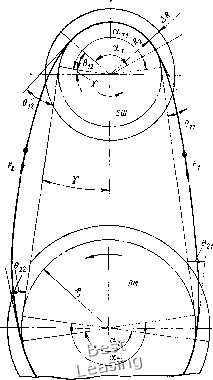 Рис. 27. Действительный контур ремня при наличии изгибной жесткости cos е = 1 - С достаточной точностью углы жесткости (рад) можно определить по приближенной формуле (59а) Из зависимостей (59) или (59а) могут быть найдены углы жесткости 6о в покое при натяжении F, а также при работе бц, на ведущем и 631, 633 - на ведовом шкивах для ведущей и ведомой ветвей при натяжениях F и F. При входе ремня в канавку шкива его элемент (см. рис. 25, б) сжимается силой dF = dF„ cos -j- - dF sin --. Поперечное сжатие на угле входа ап будет dFxbcp ErhRda (60) (61) Радиальное перемещение на угле входа dFxbcp 2 tg 2EhR da tg Подставляя сюда выражение для dF и используя выражение (42) с учетом, что на этой дуге = /, получаем радиальное перемещение на всей дуге входа (2) =--Г = -ALZ , (62) 4ЗД (2)Ztg--tg (+р здесь Яс - приведенная податливость ремня, причем 4£etetgtg(--+p) • Угол входа согласно [53 ] определяется зависимостью / I (2) - 0>о где S = viRAR {2R + AR). (63) Углы выхода из канавок aei (2) устанавливаются аналогично, причем для обоих шкивов при определении AR по формуле (62) следует подставлять натяжение ведущей ветви F, так как оно определяет заглубление ремня в канавки обоих шкивов. В результате изгибной жесткости и поперечной податливости ремней теоретический угол обхвата «т, определяемый по формуле (10), изменяется (рис. 27) до а = а 2]е+а; + а;= 180 + 2 - 1,е+а;+а;. (64) при переходе от холостого хода к работе под нагрузкой углы жесткости у ведущей ветви уменьшаются, у ведомой - увеличиваются, углы входа и выхода увеличиваются, углы обхвата при этом уменьшаются на Аос = 01 + 02 - 200 + 2а;. ео - «п - «с. (65) где 6о, «п. со - углы жесткости, входа и выхода на холостом ходу. Практического значения величины Аа, т. е. уменьшения углов обхвата, приобретают при коэффициентах тяги \{) > 0,75, когда значительное падение натяжения ведомой ветви существенно увеличивает углы жесткости у этой ветви. Влияние нагрузки на сумму натяжений ветвей с учетом различий деформаций на дугах скольжения и сцепления было установлено Е. М. Гутьяром [26], но оно оказалось существенно меньшим, чем наблюдается в опытах. Из рассмотрения потенциальной энергии отдельных частей действительного контура ремня в работе [69] установлено, что из-за наличия изгибной жесткости ремня с увеличением нагрузки силы натяжения ветвей против значений, определяемых зависимостью Понселе (56), увеличиваются на Af = 4(Сд СдСр COS Y CcosV) f„ 3/2 0,5f < + Af (66) Fl = Fq - 0,5f; + AF. Урав- здесь f; = fo нение (66) решается методом итераций. В клиноременной передаче с ростом нагрузки ремень вклинивается в канавки глубже, переходит на меньшие диаметры шкивов, и в результате этого натяжение ремня уменьшается. При малых нагрузках это снижение натяжения может превалировать над повышением натяжения от изгибной жесткости, что ясно видно из опытных кривых, представленных на рис. 28, а. При больших коэффициентах тяги влияние изгибной жесткости проявляется сильнее, и сумма натяжений ветвей растет с увеличением нагрузки. В вариаторах с подпружиненным шкивом это влияние изгибной жесткости будет ослаблено, так как с увеличением суммы натяжений ветвей повышается осевое усилие на этом шкиве, пружина деформируется и ремень смещается на меньший радиус. Изменение натяжений ветвей под нагрузкой с учетом влияния изгибной жесткости, поперечной податливости ремня и деформации пружины [5] определяется зависимостью Af - 0,5Ft [kiOLx - (аа - аса)] Af = (67) 4Сп tg(-f+p) tg-f Здесь Af находится no формуле (66), коэффициенты и из выражения kl (2) = 2tg-f \2ER, ,2)/itg- Для клиноременных передач с i = const и вариаторов без пружины в знаменателе формулы (67) последний член отбрасывается, так как AF, кгс 20
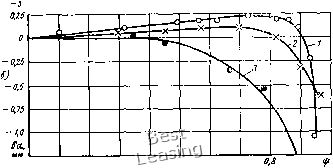 а,г e,f о,в Рис. 28. Характеристики передачи: а - изменение суммы натяжений ветвей при закрепленных валах; б - изменение межосевого расстояния при плавающем вале и F, + = = const: / -а„ = 4,8 кгс/см г -а» = 9,2 кгс/см; 3 - а„= 13,5 кгс/см Сп = оо: В передачах с плавающим валом Fi + F2 = 2Fxoл = = const, и влияние изгибной жесткости и заглубления ремня в канавке проявляются в виде изменения межосевого расстояния. С увеличением нагрузки оно вначале увеличивается, а затем сокращается (рис. 28, б). Как видно из рис. 28, с уменьшением предварительного натяжения Fo указанные явления проявляются сильнее и при а = const предельный коэффициент тяги возрастает больше. М. Т. Уразбаевым [90] и А. В. Андреевым [1] отмечено, что передача касательной силы в ременной передаче должна сопровождаться деформациями сдвигу ремня. Р. В. Вирабов [9] показал, что на дуге сцепления (покоя) происходит постепенное увели- 3 Б. А. Пронин и др. 65 чение наклона сечения плоского ремня депланация сечения (рис. 29). Элементы ремня, прилегающие к шкиву, на этой дуге движутся со шкивом без скольжения до тех пор, пока касательная сила не превысит силу трения покоя или пока деформация сдвига не достигнет определенной величины. В. К- Мартыновым [51] показано, что и в клиноременной передаче также происходит де-планация сечений, характер которой представлен на рис. 30. На дугах сцепления «„ депланация сечения нарастает. На дуге скольжения ai ведущего шкива по мере уменьшения натяжения ремня она уменьшается, а на той же дуге «сг ведомого шкива, наоборот, нарастает и снимается в момент сбега ремня. Дуги сцепления не являются пассивными - часть окружной силы передается на этих дугах, и тем больше, чем больше их протяженность [9], [51]. Этим объясняется то, что с увеличением диаметра шкива роль дуги сцепления увеличивается, а дуги скольжения уменьшается, что повышает тяговую способность. Согласно [51 ] с учетом тангенциальных деформаций уравнение Эйлера должно быть заменено зависимостями: для ведущего шкива  Рис. 29. Депланация сечений плоского ремня на ведущем шкиве [9] (68) для ведомого («2 - «сз) (69) В этих зависимостях второе слагаемое в квадратных скобках характеризует долю окружной силы, передаваемой на дугах сцепления. Использовать зависимости (68) и (69) для практических расчетов передач пока затруднительно, однако основные положения теории с учетом деформаций сдвига хорошо объясняют ряд явлений, наблюдаемых при работе ременной передачи. Из формул (44) и (45) видно, что приведенный коэффициент трения на ведомом шкиве существенно меньше, чем на ведущем. Кроме того, из выражений (68) и (69) следует, что доля окружной силы, передаваемой на дуге сцепления, у ведомого шкива меньше. Оба эти обстоятельства пригодят ктому, что угол скольжения на ведомом шкиве оказывается больше и при передаточном отношении j -> 1, когда = «з тяговая способность лимитируется сцеплением ремня с ведомым шкивом, а не с ведущим. Многочисленные опыты показывают, что буксование имеет место в этом случае именно на ведомом шкиве. При расчете это обстоятельство приближенно следует учитывать, вводя разные приведенные коэффициенты трения fx и /г для того и другого шкива. 4.2. ОСЕВЫЕ СИЛЫ НА ШКИВАХ В клиноременных вариаторах необходимое натяжение ветвей ремня создается осевым воздействием пружин, кулачков или нажимных устройств центробежного типа, гидравлических, пневматических. Поэтому для обеспечения работоспособности вариатора и его расчета необходимо определить осевые силы. Особенно важно это для систем с автоматическим регулированием, использующих связь осевой силы со скоростным и силовым режимом работы вариатора. Очевидно, что осевую силу следует находить по участкам дуги обхвата «„. ап и а;, в соответствии с особенностями взаимодействия ремня и шкива на каждом участке [66]. Осевая сила, действующая на элемент abed ремня на дуге скольжения ведомого шкива, будет (см. рис. 25, в) d/, = d/„(cos---/sinpsin). о к к ч =я я Учитывая выражение (42а), при числе ремней Z имеем = -Wb 1 - / sin§ Sin ) . 0 1 2 3 4 5 6 7 8 [ 9 ] 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 |
|||||||||||||||||||||||||||||||||||||||||||||||