

|
|

|
Промышленный лизинг
Методички
ных устройств с применением релейных схем, ибо любое реле имеет только два состояния - включено (1) и выключено (0), с применением магнитной ленты--намагниченный участок (1) и ненамаг-* ничейный (0), с применением киноленты - белая черта (1), черная (0) и других устройств и приборов, имеющих два различных устой« чивых состояния. Для записи программы на перфоленту необходимо предварительно вычислить в десятичной системе координаты опорных точек и изобразить их в двойной системе счисления. Например, координат ты равны 418 и 54 мм, тогда 418= 1-г-Ы •27-f-0-26+l-2S-f-0-2-»-f-+ 0-23 + 0-2Ч-1-2-Ю-2о и 54= 1-г-Ц •24-Ю-23-Ц .22-Ц •2-Ю-20. 
Рис. 103. Запись программ: а - на звукозаписывающей головке, б - на кинопленке Число 418 изобразится в двоичном коде по первым сомножителям 110.100.010, а 54 как 110.110. Перенос изображения числа на перфоленту начинают справа налево, располагая перфорации от нижних строчек к верхним (или наоборот). На рис. 102, б показано изображение чисел 418 и 54 в двоичной системе счисления. На перфолентах имеются также дорожки, на которых располагаются отверстия для подачи сигналов управления. Магнитные ленты с нанесенным 1СЛоем ферромагнитной эмульсии используют в качестве программоносителя при осуществлении магнитной записи. Пленку протягивают с определенной скоростью через звукозаписывающую головку (рис. 103, а), состоящую из двух полуколец /. образующих сердечник с электромагнитными катушками 2. При пропускании переменного тока через обмотку катушек в рабочем зазоре сердечника (0,01-0,02 мм) возникает переменное магнитное поле, которое оставляет на движущейся магнитной ленте 3 поперечные магнитные штрихи. При протягивании ленты с записью программы через звуковоспроизводящую головку магнитные штрихи, перемещаясь в зазоре, создают в нем переменный магнитный поток, который возбуждает в катушках электродвижущую силу и при определенных условиях ток воспроизводящей головки будет точно таким, как первичный ток записи. Запись программы на кинопленке 1 (рис. 103, б) состоит в нанесении непрозрачных штрихов 2, которые изменяют освещение фотоэлементов 3 и, следовательно, величину фототока. Каждому штриху соответствует определенная величина перемещения рабочего органа, и длина пройденного пути исчисляется количеством штрихов, умрюжершому на величину импульса (0,01-0,02 мм), а скорость - частотой импульсов (шагом штрихов). На пленке располагается несколько дорожек: / - для продольного движения стола, - для поперечного движения стоек, / - для вспомогательных команд и др. Считывающие, командные и отсчетные устройства. На рис. 104 показаны различные способы считывания программ, записанных на перфокарте или перфоленте. Щетка 2 (рис. 104, а) касается контактного барабана / и замыкает соответствующую электрическую цепь, когда против нее находится отверстие в перфорированной ленте 3. Для уменьшения износа ленты применяют шаговое перемещение с прижиманием щетки или щупа к ленте только в период ее останова. При прохождении отверстия в перфорированной ленте 2 (рис. 104, б) над штифтом 4 последний, под действием пружины 3, западает в отверстие ленты, замыкая контакты 5, которые включают соответствующую электрическую цепь, питающую электромагнит 1, который поворачивает рычаг 6 и штифт 4 опускается вниз, сжимая пружину 3 и размыкая контакты 5. При прохождении отверстия в перфорированной ленте 3 (рис. 104, в) над фотодатчиком 4 луч света из осветителя / через линзу 2 падает на фотоэлемент, в результате чего включается соответствующая электрическая цепь. Когда отверстие в трубке 3 (рис. 104,г) располагается под отверстием в перфорированной ленте 2, воздух из камеры / подается под определенным давлением в соответствующую пневматическую систему. Командные устройства преобразовывают полученные сигналы программы в командные импульсы, непосредственно управляющие исполнительными механизмами, а также сочетают в себе и элемен- 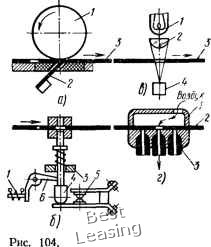 уст- Схема считывающих ройств: а - электрических, б - электромеханических, в - фотоэлектрических, г -пневматических ты следящего привода (сравнивающих устройств), образуя систему обратной связи. К числу схем командных устройств, применяемых в станкостроении, относятся анкерные, релейные, индуктивные, оптические и с магнитной записью. Схема электромеханического анкерного командного устройства (рис. 105, с) работает следующим образом. 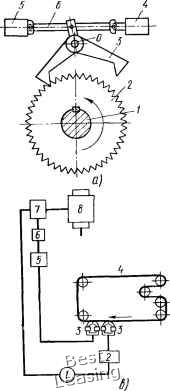  Рис. 105. Схемы командных устройств: а - анкерного, б - релейного, в - с магнитнрй записью При включении электромагнита 5 анкер 5 занимает положение, показанное на рисунке. При наличии электрического импульса в электромагните 4 тяга 6 переместится вправо, анкер повернется вокруг оси О и левый рычаг анкера освободит колессЗ 2, а правый войдет в зацепление с ним, позволяя колесу повернуться на некоторый угол, так как вал I жестко связан с колесом 2. Подавая попеременные импульсы в электромагниты 4 и 5, осуществляют периодический поворот вала / и перемещение рабочего органа на определенную длину. Схема релейного устройства командоаппарата с поляризованным реле показана на рис. 105, б. Командоаппарат состоит из ма- 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 [ 55 ] 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||