

|
|

|
Промышленный лизинг
Методички
газина сопротивлений (два одинаковых участка ri-г? и г/-г/), группы промежуточных реле Pi-Pj, потенциометра /, подвижного контакта 3 и поляризованного реле с усилителем 2. Сопротивление секций подобрано так, что они пропорциональны числам, которые в двоичной системе счисления выражаются в определенном разряде (1, 10, 100 и т. д.). Сумма сопротивлений Г1 + Г2+Г5+г+ -f...r7 равна сопротивлению потенциометра на всей его длине (/=127 мм). Отдельные сопротивления включаются и выключаются с помощью промежуточных реле Pi-Р?, цепь обмотки которых замыкается через отверстия перфокарт. Если программа предусматривает перемещение суппорта на величину /i=43 мм, где 43 = 32-f8-f 2-f 1, тогда реле включают секции сопротивлений Ге, Г4, Гг, Гь а Г7, Г5, Гз отключают, и ток от точки d пойдет в обход секций Гу, г, и Гз, напряжение в точке b становится равным напряжению в точке а потенциометра; сопротивление потенциометра на участке /2=127-43 = 84, где 84 = 644-16+4, что соответствует сумме величин сопротивлений г/, г, Гз. Пока подвижной контакт 3 перемещается к точке а, напряжение в точке f будет меньше напряжения в точке b и движение суппорта будет продолжаться. При достижении подвижных контактом точки а напряжение в точках b и / сравняются и поляризованное реле отключит двигатель. Система промежуточных реле представляет собой запоминающее устройство, которое удерживает зафиксированные данные (/, = 43 мм) до поступления новой информации. Схема командного устройства с магнитной записью (рис. 105, в) действует следующим образом. Пусть необходимо записать программу, состоящую из периодических включений электродвигателя 8 для вращения рабочего органа станка. Для записи программы нажимают кнопку / идержат ее до тех пор, пока двигатель 8 отключится. Количество включений, время работы двигателя и интервалы между включениями определяются программой. При нажатии кнопки / одновременно с двигателем 8 включается и генератор 2 звуковой частоты, ток от которого поступает в записывающую головку 3, по которой протягивается магнитная лента 4. При работе двигателя и генератора на ленте образуются магнитные штрихи. Если включить воспроизводящую головку, то при перемещении ленты в сердечнике головки будут воспроизводиться записанные сигналы, которые в виде тока, усиленного усилителем 5, поступают в реле 6 и включают пускатель 7 и, следовательно, двигатель 8. Пускатель будет находиться под током до тех пор, пока на ленте не кончится магнитная запись, после чего возбуждение тока в головке прекратится и двигатель 8 отключится. Индуктивный датчик (рис. 106, а) состоит из стержня/, сердечника 2 и регистрирующего прибора 3. Стержень 1 выполняется из магнитного материала с точными размерами выступов и впадин (порядка 3 мкм) и соединяется со станиной станка. Ш-об-разный сердечник, выполненный с такой же степенью точности, имеет две встречные обмотки, питающиеся от вторичной обмотки входного трансформатора. При совпадении оси сердечника с осью выступа стержня стрелка прибора, включенного по мостовой схеме, занимает нулевое положение благодаря равенству индуктивных сопротивлений левой и правой частей датчика. Если сердечник смещается вправо или влево, то симметрия нарушается и стрелка прибора отклоняется в ту или иную сторону на величину, пропорциональную величине смещения сердечника. Датчик позволяет от- J-1 1-I 1- 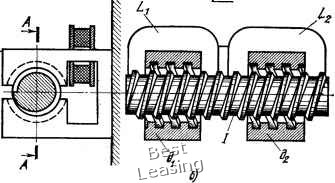 Рис. 106. Индуктивные датчики: индуктивного датчика, б - винтовой индуктивный датчик считывать ПО показаниям прибора расстояния от нуля до величины шага выступов с точностью до 3 мкм. При перемещении на один шаг стрелка прибора возвращается в нулевое положение. При использовании индуктивных датчиков такого типа необходимо иметь две системы отсчета: одну для отсчета целых шагов и вторую для отсчета точных перемещений в пределах одного шага. Индуктивные датчики применяются в системах управления ко-ординатно-расточными станками. Винтовой индуктивный датчик (рис. 106, б) состоит из винта подачи / и двух полугаек di и 2 с катушками Li и Lj, включенными в потенциометрическую дифференциальную схему (рис. 107). Между винтом и гайкой имеется зазор 0,2 мм и для повышения чувствительности полугайки смещены относительно витков винта на половину шага, т. е. на толщину витка резьбы, благодаря чему создается дифференциальность индуктивной системы, так как при смещении полугаек вместе со столом относительно винта выступы его резьбы отдаляются от выступов одной полугайки и приближаются к выступам другой полугайки, изменяя индуктивность катушек и ток в цепи гальванометра И. При среднем осевом положении витков полугаек относительно витков винта система находится в равновесном состоянии и ток в цепи гальванометра равен нулю. При этом датчик подает импульс поляризованному реле РП, управляющему движением стола через электродвигатель 1М подачи стола. При достижении нулевого положения, соответствующего заданной координате, датчик подает на электродвигатель 1М команду «стоп». Оптический датчик (рис 108) имеет две стеклянные пластинки- неподвижную линейку / и движок 2 с нанесенными на них рисками. Линейка и движок освещаются с одной стороны лампой 4, и лучи света, проходя через пластинки, воспринимаются фотоэлементом 3. Толщина рисок на линейке и движке равна величине промежутка между рисками, поэтому при перемещении движка 2 относительно линейки / освещенность фотоэлемента изменяется от минимальной величины, когда риски движка закрывают промежутки между рисками на линейке до максимальной, когда риски на движке и на линейке совпадают. При этом фототок на выходе фотоэлемента изменяется по синусоидальному закону. Если соединить линейку со станиной, а движок со столом и нанести на линейке и движке 250 линий на 1 мм, тогда изменение освещенности фотоэлемента от минимальной до максимальной величины будет соответствовать перемещению рабочего органа на 2 мкм. Чтобы определить направление перемещения рабочего органа, необходимо установить два движка так, чтобы риски одного из них совпадали с рисками линейки, в то время как риски другого движка совпадают с прозрачными участками линейки. Тогда в зависимости от направления движения стола впереди будет двигаться один 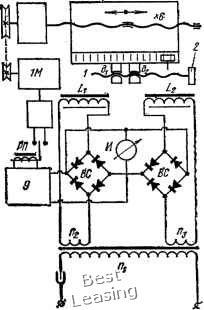 Рис. 107. Дифференциальная мостовая схема на потенциометрах 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 [ 56 ] 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |