

|
|

|
Промышленный лизинг
Методички
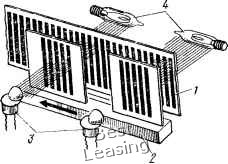 Рис. 108. Схема оптического датчика ИЗ движков и фазовый сдвиг сигналов на выходе фотоэлементов даст возможность автоматически различать направления перемещения. В связи с трудностью строго параллельной установки рисок иа движке и линейке применяют умышленный перекос рисок так, чтобы каждая из рисок движка перекрывалась с двумя-тремя рисками линейки. В результате при перемещении движка вправо или влево образуются горизонтальные темные и светлые полосы, которые дви-жутся вверх или вниз то затемняя, то освещая фотоэлемент. Установив за движком два фотоэлемента так, чтобы один был освещен, а другой в это время затемнен, .получают тот же эффект, что и при установке двух движков и линейки с параллельными линиями. Оптические датчики применяются в системах управления фрезерными станками для непрерывного измерения перемещений с отсчетом мелкими шагами и преобразованием непрерывного перемещения суппорта в совокупность дискретных электрических импульсов. Потенциомет ри че-ский датчик (рис. 109) используется для одноот-счетной системы управления модулированием напряжения и измерения перемещений рабочего органа. Задающий датчик ЗП и датчик обратной связи ПОС, являющиеся потенциометрами (неподвижные стержни, на которые намотана проволока с большим омическим сопротивлением), соединены в мостовую электрическую схему, в диагонали которой включено сравнивающее устройство УС в виде магнитного реле. Величина перемещения рабочего органа, записанная на программоносителе, считывается и преобразуется в напряжение на задающем потенциометре /з.п, величина которого сравнивается с напряжением на потенциометре обратной связи f/noc, следящем за изменением напряжения на задающем потенциометре, т. е. за перемещением рабочего органа станка. Если f/gn-f/nocO, то система находится в неравновесном состоянии и сравнивающее устрой- 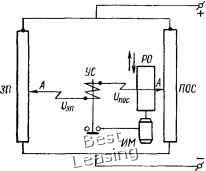 Рис. 109. Схема потенциометрического датчика ство УС включает привод ИМ рабочего органа РО по часовой илге против часовой стрелки, в зависимости от знака Уза-t/noc Перемещение рабочего органа и ползушки А происходит вперед или назад, до тех пор, пока t/3n=I/noc и система придет в равновесное состояние, при этом сравнивающее устройство УС обесточится и выключит привод движения рабочего органа. Если в перемычку моста вместо сравнивающего устройства УС включить гальванометр и, регулируя задающий потенциометр, установить стрелку гальванометра на нуль, то при последующем перемещении рабочего органа и ползушки потенциометра в ту или: иную сторону нарушится равновесие моста и величина перемещения рабочего органа (или величина разбаланса) будет определяться по показаниям гальванометра. Потенциометрические датчики применяются в системах управления токарными, токарно-карусельными и координатно-расточны-ми станками в комбинации с индуктивными датчиками. Системы серводействия и слежения. Сельсинная передача. Усилие, необходимое для перемещения инструмента относительно заготовки, может достигать в металлорежущих станках нескольких тысяч килограммов. В системах с механическим управлением усилия управления в этом случае оказываются равными рабочему усилию (например, в больших копировально-фрезерных станках). Принцип серводействия позволяет управлять рабочими мощностями в сотни и тысячи раз большими, чем мощность управляющего сигнала. Сельсин (рис. ПО, а) по внешнему виду напоминает электродвигатель малых размеров с трехфазными обмотками на статоре, расположенными под углом 120°, и однофазной двухполюсной обмоткой на роторе. Сельсинная передача состоит из двух сельсинов, у которых обмотки статоров и роторов соответственно соединены между собой, и обмотки роторов подключены параллельно к источнику переменного тока. К роторам сельсинов напряжение подводится с помощью укрепленных на роторе медных колец и прижатых к ним неподвижных металлических щеток. Переменное напряжение, подведенное к обмоткам ротора, создает переменное магнитное поле, которое, пересекая обмотки статора, вызывает в них электродвижущую силу и переменный ток. При этом, если направление тока в обмотках одного сельсина сверху вниз, то в обмотках другого - снизу вверх и наоборот. Магнитные поля, дополнительно возникающие в обоих статорах, действуют также навстречу друг другу, а магнитные поля роторов - в одинаковом направлении. Следовательно, магнитные поля ротора и статора в сельсине-приемнике имеют одинаковое направление, а в сельсине-датчике противоположное. Если ротор датчика повернуть на определенную величину, тогда на такую же величину повернется суммарное магнитное поле статора приемника. Следовательно, сельсин-датчик работает как генератор, а сельсин-приемник - как электродвигатель. Однако такая сельсинная передача может работать только на холостом ходу, так как при значительных нагрузках возникает большая погрешность в передаче. Для обеспечения синхронного вращения роторов сельсинов при значительных моментах сопротивления применяется принцип серводействия, которым обладает сельсин-приемник дифференциального действия. Дифференциальный сельсин (рис. 110, б), применяемый для целей автоматического управления, генерирует напряжение, пропорциональное разности угловых положений ведущего и ведомого звеньев передачи, которое после усиления используется для управления исполнительным двигателем. Обратная связь осуществляется путем передачи вращения от ведомого вала к ротору дифференциального сельсина. Принцип серводействия в данном случае состоит в том, что только ничтожная доля мощности, передаваемой ведомому валу, используется для поворота ротора дифференциального сельсина. При совпадении положений ротора датчика и ведомого вала (рассогласование равно нулю) напряжение, управляющее двигателем приводу (напряжение, генерируемое в роторе дифференциального сельсина), также равно нулю. Таким образом, дифференциальная сельсинная передача работает как следящая система с обратной связью. Сельсинные передачи применяются в системах цифрового управления фрезерными и координатно-расточными станками. Приводы подач в станках с ЧПУ применяются трех типов: регулируемый, следящий и шаговый. Системы управления приводом делятся на замкнутые (с обратной связью от датчика) и разомкнутые (без датчика, с шаговым двигателем). Приводы подач со ступенчатым регулированием (рис. 111, а) применяются в прямоугольных и позиционных системах. Трехфаз- 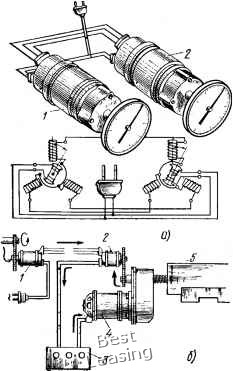 Рис. ПО. Сельсиииая передача: а - простая, б - дифференциального действия: / - сельсин-датчик, 2 - дифференциальный сельсин, 3 -усилитель, 4 - исполнительный двигатель. 5 - стол станка 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 [ 57 ] 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |