

|
|

|
Промышленный лизинг
Методички
1Ш Щш\ счу Обратная сдюь обратная сдязь I ГУМ\-./N/V§./N./ ный двигатель переменного тока М соединен с ходовым винтом одной из координат станка через электромагнитную муфту ЭМ2, которая включается от системы числового управления СЧУ. При повороте ходового винта датчик измерительного устройства Д дает соответствующее количество импульсов. В зависимости от величины остатка перемещения, определяемого дешифраторами ДШ1 и ДШ2, включается электромагнитная муфта быстрого хода ЭМ2 или медленной подачи ЭМ1. При достижении заданного перемещения дается команда на торможение муфты ЭМ2, диск которой при этом прижимается к корпусу. Схема имеет двухступенчатый привод и количество сигналов, поступающих от системы числового управления, зависит от количества ступеней привода. Бесступенчато-регулируемый привод (рис. 111, б) действует аналогично, но не имеет электромагнитных муфт. СЧУ подает сигналы мощному преобразователю П, который подает определенное напряжение на электродвигатель регулируя его скорость и подачу рабочего органа. При этом функция системы управления состоит в изменении направления вращения двигателя, его скорости и выдачи команды на торможение после перемещения. Привод применяется в позиционных н прямоугольных системах. Следящий привод отличается от регулируемого тем, что на двигатель подачи поступает напряжение, зависящее от заданной скорости подачи и рассогласования задаваемой СЧУ величиной перемещения и фактически отработанного перемещения, измеренного датчиком обратной 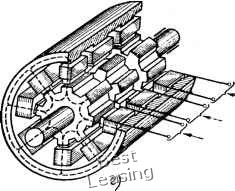 Рис. 111. Различные виды приводов подач: а - схема ступенчатого привода, б - схема регулируемого и следящего привода, в -схема шагового привода, г - шаговый электрический двигатель связи. Привод применяется также и в контурных (непрерывных) системах. Современный следящий привод обеспечивает большой диапазон регулирования (до 1000), высокие скорости подачи (до 5- 10 м/мин) и хорошие динамические характеристики (время разгона и торможения и величину рассогласования). Недостатком является сложность системы управления с применением мощного ти-ристорного преобразователя. Электрогидравлический шаговый привод (рис. 111, в) применяется для привода подач станков с ЧПУ при небольших перемещениях исполнительных механизмов (до U5 м). Схема шагового привода состоит из системы числового управления СЧУ, шагового электродвигателя ШД, гидравлического усилителя моментов ГУМ и шарикового винта. Гидроусилитель моментов необходим потому, что шаговые двигатели маломощны для перемещения исполнительных механизмов станка. Гидроусилитель крутящих моментов обеспечивает синхронное вращение входного и выходного валов с увеличением крутя-щ.его момента на выходе по сравнению с крутящим моментом на входе за счет использования энергии масляного потока, подводимого к усилителю. Входной вал можно вращать с постоянной или переменной скоростью, а также периодически поворачивать на любой угол. Шаговый электрический двигатель (рис. 111,г) •имеет статор с четным числом полюсов. Ширина полюсов и промежутков между ними одинакова. По длине статора полюса разделены на три равные секции, снабженные отдельными обмотками с независимым питанием. При этом каждая смежная пара полюсов данной секции имеет различную полярность. Ротор шагового двигателя имеет число полюсов, равное числу полюсов статора, и также разделенные на три секции, но сдвинутые взаимно на /з и Vs межполюсного расстояния. Если последовательно подводить напряжение к обмоткам только первой, второй и третьей секций статора, тогда ротор под действием возникающего магнитного поля будет поворачиваться на Vs, Vs и Vs шагового расстояния, т. е. при 20 полюсах статора и ротора на 6°, 12° и 18°, а при 30 полюсах - на 4°, 8° и 12°; шаговое 360 360 расстояние соответственно равно - и -. 20-3 30-3 Если после первой обмотки статора включить не вторую, а третью обмотку, тогда ротор повернется на 7з полюсного расстояния, но в другую сторону, т. е. заменив последовательность включения секций статора с 1, 2, 3 на 1, 3, 2, изменяем направление вращения ротора. При большой частоте переключения полюсов (до 1 млн. шагов в минуту) ротор будет вращаться не прерывисто, а практически равномерно с определенной скоростью, зависящей от числа переключений полюсов в минуту. Время разгона и выбега ротор-а невелико и измеряется долями секунды. Электрическая схема управления шаговым двигателем состоит из кольцевого коммутатора, преобразующего последовательность входных импульсов в последовательность включения фаз шагового двигателя и мощных усилителей, питающих фазовые обмотки ша-гового двигателя. Шариковый винт и устройство для предварительного натяга. В целях повышения точности перемещения рабочих органов станка с программным управлением, устранения влияния мертвого хода в системе винт-гайка и повышения точности ходового винта применяются шариковые винты (рис. 112, а). Винт и гайка имеют совпадающие винтовые беговые дорожки для шариков, которые заполняются стальными шариками по всей длине. Трубчатая направляющая, смонтированная на гайке, прерывает путь шариков, направляя их из винтовой дорожки по диагонали поперек наружной части гайки и обратно в беговую дорожку. Данный механизм является замкнутой системой, в которой при вращении винта и гайки происходит непрерывная циркуляция шариков, передающих силовой поток. Потери на трение в шариковых винтах снижаются и к. п. д. достигает 90%. Шариковые винты обладают свойством реверсивности, позволяющей преобразовать не только вращательное движение в поступательное, но и наоборот, поступательное во вращательное. Имеющийся в шариковых винтах небольшой осевой люфт (до 0,1 мм) в силу допусков на изготовление шариков и канавок винта и гайки устраняется посредством устройства, состоящего из двух гаек 2, между фланцами которых помещается промежуточная шайба 1. Точная регулировка величины люфта в необходимых пределах достигается подгонкой толщины шайбы. При обработке криволинейных профилей и применении инструмента с прерывными режущими кромками изменяется величина и направление составляющих сил резания, и это вызывает неравномерное отжатие рабочего органа под воздействием упругих деформаций винтовой пары. Для компенсации этих деформаций применя- 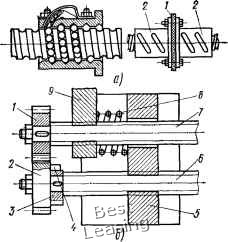 Рис. 112. Шариковый винт и устройство для предварительного натяга: а - шариковый винт, б - устройство предварительного натяга в цепи привода подачи 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 [ 58 ] 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |