

|
|

|
Промышленный лизинг
Методички
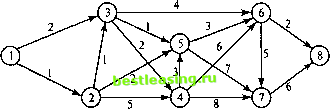 Рис. 6.17. Сеть для задачи из упражнения 1 6 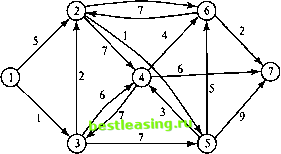 Рис. 6.18. Сеть для задачи из упражнения 2 Алгоритм Флойда. Этот алгоритм более общий по сравнению с алгоритмом Дейкстры, так как он находит кратчайшие пути между любыми двумя узлами сети. В этом алгоритме сеть представлена в виде квадратной матрицы с п строками и п столбцами. Элемент (£, /) равен расстоянию dtj от узла i к узлу /, которое имеет конечное значение, если существует дуга (i, j), и равен бесконечности в противном случае. Покажем сначала основную идею метода Флойда. Пусть есть три узла i, j и k и заданы расстояния между ними (рис. 6.19). Если выполняется неравенство dtj + djk < dllt, то целесообразно заменить путь i -> k путем i->;->ft. Такая замена (далее ее будем условно называть треугольным оператором) выполняется систематически в процессе выполнения алгоритма Флойда.  Рис. 6.19. Треугольный оператор Флойда Алгоритм Флойда требует выполнения следующих действий. Этап 0. Определяем начальную матрицу расстояний D0 и матрицу последовательности узлов S0. Диагональные элементы обеих матриц помечаются знаком - , показывающим, что эти элементы в вычислениях не участвуют. Полагаем k = 1. 1 2 ... j ... п 1 2 ... j ... л So = Основной этап к. Задаем строку k и столбец k как ведущую строку и ведущий столбец. Рассматриваем возможность применения треугольного оператора ко всем элементам dtj матрицы Dk r Если выполняется неравенство dik + dkj < d,j> (i*k,j*kni*j), то делаем следующее: a) создаем матрицу Dk путем замены в матрице Dk 1 элемента dtj суммой dlk + dkj, b) создаем матрицу Sk, меняя в матрице S4 j элемент s, на h. Полагаем k = k + 1 и повторяем этап ft. Поясним действия, выполняемые на k-м этапе алгоритма, представив матрицу Dk j так, как она показана на рис. 6.20. На этом рисунке строка k и столбец k являются ведущими. Стро-ка i- любая строка с номером от 1 до А - 1, а строка р - произвольная строка с номером от k + 1 до л. Аналогично столбец / представляет любой столбец с номером от 1 до k - 1, а столбец q - произвольный столбец с номером от k + 1 до л. Треугольный оператор выполняется следующим образом. Если сумма элементов ведущих строки и столбца (показанных в квадратиках) меньше элементов, находящихся на пересечении столбца и строки (показаны в кружках), соответствующих рассматриваемым ведущим элементам, то расстояние (элемент в кружке) заменяется суммой расстояний, представленных ведущими элементами. После реализации л этапов алгоритма определение по матрицам Dn и Sn кратчайшего пути между узлами i и j выполняется по следующим правилам. 1. Расстояние между узлами i и j равно элементу dtJ в матрице Dn. 2. Промежуточные узлы пути от узла i к узлу j определяем по матрице Sn. Пусть s0 = k, тогда имеем путь i -> k -> /. Если далее slk = k и skj = j, тогда считаем, что весь путь определен, так как найдены все промежуточные узлы. В противном случае повторяем описанную процедуру для путей от узла i к узлу k и от узла k к узлу Столбец j Строка i Ведущая строка Строка р Ведущий столбец Столбец Q 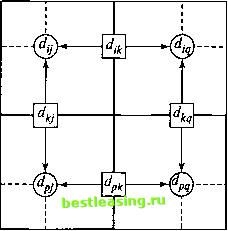 Рис. 6.20. Реализация треугольного оператора Пример 6.3.5 Найдем для сети, показанной на рис. 6.21, кратчайшие пути между любыми двумя узлами. Расстояния между узлами этой сети проставлены на рисунке возле соответствующих ребер. Ребро (3, 5) ориентированно, поэтому не допускается движение от узла 5 к узлу 3. Все остальные ребра допускают движение в обе стороны. 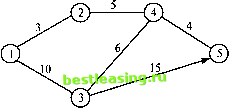 Рис. 6.21. Сеть для примера 6.3.5 ЭтапО. Начальные матрицы D0 и S0 строятся непосредственно по заданной схеме сети. Матрица D0 симметрична, за исключением пары элементов и d53, где d63 = ос (поскольку невозможен переход от узла 5 к узлу 3).
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 [ 80 ] 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 |